一双灵巧手比车还贵?40+企业拆解方知物有所值
- 2025-07-25 18:00:00
没有手,再厉害的机器人也只是“理论派”
尤其在装配、手术等场景中,
双手协同是完成精密操作的刚需
但给机器人做一双手,可以有多贵?
在海外市场,Shadow Hand、SHUNCK
等企业的灵巧手
一只要卖到70-200万元,价格甚至超过一台高端轿车
近些年,在国内厂商们的努力下
灵巧手价格已经做到了10万/只以内
但成本还是占到了整机的1/3-1/4
那么问题来了
为什么灵巧手这么贵?
1
“灵巧手的开发量,占整机工程量的一半”
一言以蔽之,灵巧手承担了机器人所有精细操作的责任。以模拟人类活动为主要特征的人形机器人,精细操作的复杂性、多样性与传统机器人相比大幅提升。因此,灵巧手在硬件性能、感知维度和控制精度上的要求,远超夹爪等传统末端执行器。
“开发灵巧手的工程量,占到整机开发工程的一半。即便是最灵活的机器人,也做不到所有人类所有的活动,但这仍然是非常困难的事情。”

2
灵巧操作,对“手-眼-脑”综合能力的考验
灵巧手巨大的开发量,源自于模拟和实现人类手部「手-眼-脑」三者的协调配合的复杂系统上。其中,“手”考验的是硬件设计能力与核心零部件的性能;“眼”考验的是力觉、触觉、视觉等多维感知系统的精度与实时性;“脑”考验的是模型与算法赋予的推理决策与动作规划能力。

对于灵巧手产业这片蓝海,能够三者齐头并进自然最好。但在资源有限的情况下,各家企业也可以依凭“看家本领”,开辟适合自己的“立足之地”。


【灵巧手(部分)代表产品分布图】
01.“手”
在方寸之内施展“空间魔术”
小型化与轻量化,是灵巧手产品硬件设计的“硬指标”。
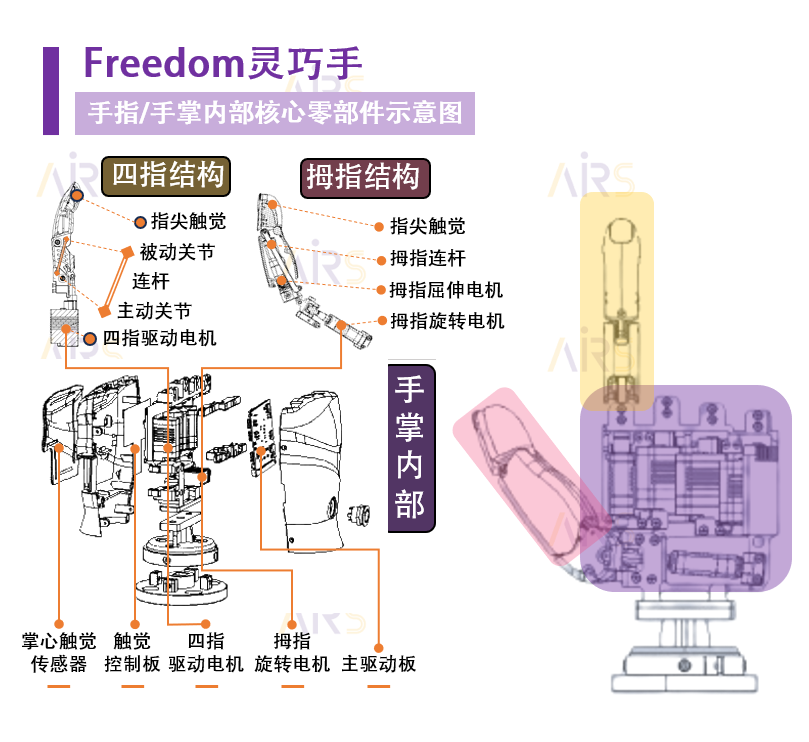
以目前市面上最常见的“6主动+5被动”连杆设计灵巧手为例,在手掌见方的空间内,塞入六枚子弹大小的电机驱动模块,以及驱动板、感知集成模块、连杆、铰接机构等一系列零部件。完成如此高集成度的硬件设计,对工程团队而言是一项巨大挑战。
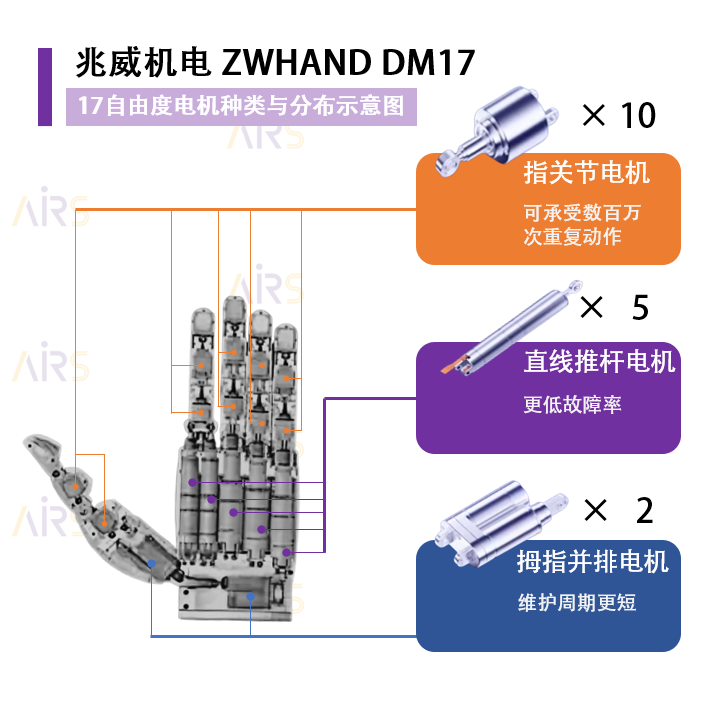
在“手”这个领域,兆威机电可谓是目前最极致的玩家之一了。公司最新发布的LM17灵巧手,在17个关节采用了全电机驱动。不仅如此,他们还在不同的关节处采用了尺寸各异的驱动模块,这种差异化设计显著提高了关节灵活度和空间利用率,避免了单一规格电机在某些关节无法充分利用空间或无法提供足够扭矩的问题。能做到这点,得益于兆威机电在微型传动领域深耕多年后,形成了丰富的产品矩阵,在设计和选型时获得了更大的自由度。
除了连杆传动方案,腱绳传动也是灵巧手的主流设计方案之一。通过将驱动电机后置于“手臂”处,为手掌区域省下了原本放置电机的空间,但其设计难度也不比连杆方案简单多少。以中科硅纪Casia Hand-H灵巧手为例,21个腱绳驱动单元虽然没有占据手掌部分的空间,但大量的分线盘、导线轮、张紧轮等衍生机构,仍然使设计复杂度大幅提升。

与驱动、传动等核心模块相比,灵巧手内部线缆的安置看似无伤大雅,却是保证灵巧手稳定性和持久性的关键要素,同样是不容忽视的一环。在空间极度受限的条件下,工程师需为传感器线与电机线预留孔槽,确保无外露线缆(防剐蹭),并通过张紧机构维持线缆在不同弯曲状态下的稳定性。

硬件设计的整体水平如何,除了定位精度、抓握力等性能以外,还有个容易被忽视的指标——温度控制。高功率密度的微型电机持续工作会产生大量热量,保证灵巧手整体保持在30-50°C左右的工作温度,才能避免控制板烧坏、电机失灵等意外的发生。因此,温升控制是对内部空间排布是否合理,散热方案是否有效的终极考验。

02.“眼”
通过触摸解码不可见的世界
灵巧手的“眼”,泛指其探测周边环境的感知系统,通常由力觉、触觉、视觉等维度通力合作完成。
类似于人手,触觉感知是灵巧手最核心的感知系统之一。在日常生活中,我们可以接触到许多带有触屏类的智能设备,然而这类设备用到的触觉传感器,难以满足灵巧手对触觉感知的需求。原因在于此类传感器通常只可识别单一维度,而只有能够反馈接近觉、滑觉、温觉等信息的多维触觉传感器,才能满足灵巧手实现精细操作的需求。

与触觉感知多维度相对应的,触觉传感器的产品类型也不尽相同。按照实现的技术路径不同,大致可分为压电式、磁导式、电容式、压阻式与视触觉等类型。
不同技术路径下的触觉传感器产品各有特色,比如传统电容式传感器成本低、可大面积部署,但是测试维度偏少、且容易受到温湿环境干扰;而磁导式传感器测试维度多、灵敏度强,但价格相对偏高。

【不同技术原理的触觉传感器特点信息表】
灵巧手玩家中有不少精通触觉传感器的玩家,帕西尼感知自主研发ITPU多维触觉传感技术,将传统触觉传感器的单一压力感知拓展至多种物理属性解析(如压力、温度、纹理、硬度、滑动等),赋予机器人"类人级"的细腻触感。
技术通过高密度阵列集成(单只灵巧手DexH13搭载978-1140个ITPU单元),实现0.01N超高精度力控与5-6kg负载能力的完美平衡,既能轻柔抓握鸡蛋,又可稳定搬运重物。

【帕西尼ITPU】
戴盟机器人的触觉传感器DM-Tac W采用的是光学视触觉融合技术。其核心创新在于将摄像头集成于毫米级超薄结构中,每平方厘米覆盖4万个感知单元(超人手密度16倍),同步捕捉物体形貌、纹理、软硬、滑移、正压力与切向力等多种物理属性。
配合120Hz高频信号输出与触觉流算法,DM-Tac W在500万次按压测试后仍保持信号零漂移,寿命达工业级标准。该传感器已集成于五指灵巧手DM-Hand1,赋能机器人实现易碎件柔顺抓取、精密装配等高难度任务。

【戴盟触觉传感器DM-Tac W】
03.“脑”
让灵巧手学会“思考如何操作”
灵巧手的“脑”,是协调“手”的硬件能力与“眼”的感知数据、最终实现精准操作的控制中枢。它的核心任务,是在毫秒间完成“感知-决策-执行”的思考闭环,与之相关的模型/算法,大致可以分成四种类型:
1. 感知理解类(目标检测/行为预测)
2. 策略规划类(抓取策略生成/任务分解)
3. 运动控制类(姿态控制/力位混合控制)
4. 自主学习类(模仿学习/强化学习泛化)
感知理解类算法/模型解决的是环境与目标的理解问题,通过动态建模等方法,预测操作环境和抓取目标的属性、位置、状态等信息。北京大学王鹤团队开发的UniDexGrasp算法基于场景中物体的点云信息,精准分离出目标的物体轮廓,推算出6D位姿,并据此生成适合的抓取手势。

【UniDexGrasp-抓取位姿生成】
策略规划类算法/模型解决的是解决任务分解与动作序列优化问题,通过时空建模生成多指协同接触点与时序动作。浙大工控所团队发布DiffContact模型,通过接触图生成→时序轨迹优化的两阶段策略,完成静态任务分解与动态序列生成,解决灵巧手高自由度协同难题,将多指协同的标注稳定性提升35%,复杂任务分解成功率提升40%。

【DiffContact示意】
运动控制类算法/模型解决的是解决高自由度协同下的精准力位调节问题,实现灵巧手抗扰动操作。睿研智控的15自由度灵巧手利用力位混合智能控制算法,可以无需依赖触觉传感器即可实现自适应抓取,完成如猜拳、握笔、握鸡蛋、摘草莓、递名片等复杂动作和精准抓放。

【睿研智控】
自主学习类算法/模型解决的是解决数据依赖与跨场景泛化问题,降低真实训练成本并提升迁移能力。灵巧智能开发了具身智能训练平台,打通“视-臂-手-触-动全链路”,支持虚拟环境下的灵巧操作训练。其产品DexHand021采用“仿真迁移训练”方法,通过虚拟环境降低数据依赖,并实现“高成功率抓取”。

【灵巧智能-仿真操作训练示意】
当前,灵巧手技术正处于高速发展阶段,『手』的硬件集成、『眼』的多维感知、『脑』的智能算法,每一环都蕴藏着巨大的创新潜力。令人欣喜的是,成本的实质性下降已成事实——今年以来,多家企业已将灵巧手的价格带入“万元时代”,显著降低了应用门槛。随着技术创新与产业链优化的持续推进,灵巧手的成本还将进一步下探。这不仅将释放人形机器人的商业化潜能,更是打通具身智能规模化落地的关键一环。
《40+灵巧手企业数据库》
领取方式👇

添加作者微信加入读者群交流 👇


实习研究员 Hozier
微信:Hoziercheung
 扫码添加微信
扫码添加微信

- 点赞 (0)
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊