


【倒计时10天】CCRS2025丨分论坛:机器人前沿论坛
- 2025-07-22 20:00:00


中国机器人学术年会是我国机器人领域规模和影响力最大的学术盛会之一,大会聚焦机器人领域的前沿技术、行业发展以及创新成果,通过搭建高水平的学术交流平台,汇聚业内顶尖专家学者、产业精英,通过学术交流、技术探讨、展示展览等方式,持续推动我国机器人产业的高质量发展。
第六届中国机器人学术年会(CCRS2025)将于2025年8月1日-3日,在湖南长沙召开,本届年会由中国机械工程学会机器人分会、中国自动化学会机器人专业委员会、中国宇航学会机器人专业委员会、中国自动化学会共融机器人专委会、中国图象图形学学会视觉检测专委会、中国人工智能学会智能机器人委员会、中国计算机学会智能机器人专委会、中国指挥与控制学会无人系统专业委员会共同主办。以“人机共融,智向未来”为主题,邀请我国机器人与人工智能领域相关院士、资深专家等200余人通过主旨报告、研讨会等形式在工业机器人、服务机器人、特种机器人、群体智能与群体机器人、人形与仿生机器人及其它热点主题下开展热烈讨论,研讨发展趋势,交流技术成果,预计参会人数3000人以上。
本届会议由湖南大学王耀南教授、华中科技大学丁汉教授、哈尔滨工业大学刘宏教授和中国科学院沈阳自动化研究所于海斌教授共同担任大会主席;由湖南大学张辉教授、华中科技大学陶波教授、中国科学院沈阳自动化研究所刘连庆研究员、哈尔滨工业大学朱延河教授和西安交通大学兰旭光教授共同担任大会组织委员会主席。
近年来,随着人工智能技术、数字信息技术的发展,机器人产业得到飞速的发展。CCRS会议的举行为机器人产业的发展提供新的增长能动,同时也为产业联动、产学研发展提供了深入交流的机会。CCRS会议将一如既往搭建好交流沟通的平台、提供更加深入全面的合作方案,也期待与更多企业开展合作,携手构建开放创新的机器人产业生态,共同绘制智能时代的人机共融新图景!
▍论坛信息
论坛名称
机器人前沿论坛

王 东
大连理工大学 教授
大连理工大学控制科学与工程学院教授,博士生导师,国家级高层次人才入选者,智能控制研究所所长,控制科学与工程学位授权点和电子信息类学位授权点点长。主要从事多智能体分布式控制与优化、强化学习与博弈对抗和多机器人协作控制方面研究工作。在世界知名学术出版社Springer出版英文专著1部,在Automatica等国内外核心期刊、会议发表和录用论文130余篇,其中控制领域顶级期刊Automatica论文7篇(长文5篇),IEEE Trans. Automatic Control论文4篇,IEEE其它汇刊论文20余篇,Google学术总引用3000余次,得到来自国内外30余位院士和IEEE Fellow引用和好评。授权国家发明专利16项,软件著作权5项。担任国际知名SCI检索期刊《Information Sciences》和《Neurocomputing》副主编, 国内核心期刊《控制理论与应用》,《智能系统学报》和《航空兵器》编委。IEEE高级会员、中国自动化学会会员、中国人工智能学会会员、中国指挥与控制学会会员、以及多个国际会议程序委员会委员。

赵兴炜
华中科技大学 教授
1989年1月生,博士,教授,博士生导师,国家级青年人才,湖北省楚天学者。本科和硕士毕业于德国杜伊斯堡艾森大学,博士毕业于德国柏林工业大学。主要研究方向包括人形机器人、具身智能。主持国家青年基金、面上基金、国家重点研发课题,工信部高质量发展专项课题。获2023年湖北省科学技术进步一等,2022年科创中国先导技术奖,2022年机械工业科学技术奖(技术发明)特等奖,中国机械工程学会好设计金奖等。担任中国机械工程学会机器人分会委员会委员。发表SCI论文50余篇,获批中国发明专利20余项,相关论文获中国科协优秀科技论文奖、中国机械工程学会优秀科技论文奖、《中国科学:技术科学》高影响力论文奖等。
▍论坛讲者

喻俊志
北京大学 教授
报告题目:
水下鱼眼视觉感知与控制
报告内容简介:
水下视觉系统对于提高水下航行器在复杂环境中的感知能力至关重要,而鱼眼镜头因其超广角视场而被广泛用于水下视觉系统中,能够提供近乎全景的视觉感知,助力机器人更好地理解周围环境并与环境交互。水下鱼眼视觉感知研究包括鱼眼视觉系统设计、图像畸变矫正、水下图像增强、目标检测与识别、视觉增稳控制以及视觉导航定位等方面。本次报告中着重介绍在水下鱼眼视觉感知与控制方面的最新研究成果。具体地,开发了基于可动云台视觉系统和仿生鱼眼双目视觉系统,提出了图像增强、目标检测、视觉增稳控制的系列方法,显著提升了水下视觉感知能力。在此基础上,开展了基于鱼眼视觉定位方法和基于视差注意力机制的导航研究,进一步展示其独特的应用优势和广泛应用前景。
个人简介:
北京大学博雅特聘教授,海洋研究院副院长,IEEE Fellow、CAA Fellow、国家杰出青年基金获得者、国家级领军人才、入选国家百千万人才工程、享受国务院政府特殊津贴等。主要研究方向为智能机器人、机电一体化、计算智能等。在机器人与自动化领域发表学术论文300余篇,包括IEEE汇刊论文180余篇;获授权发明专利70件、美国专利6件;获国家自然科学二等奖、北京市科学技术一等奖、中国自动化学会自然科学一等奖、技术发明一等奖等。

谢 晖
哈尔滨工业大学 教授
报告题目:
医疗微纳机器人技术及应用
报告内容简介:
微纳机器人技术正在引领生物医学领域的革命性变革,作为精准医疗时代的前沿科技,它将改变我们对疾病诊断和治疗的传统认知。这些微观世界的智能“医生”能够穿越复杂的生物屏障,直达病灶深处执行精确任务,为攻克人类重大疾病提供了前所未有的技术路径。从体内药物靶向递送到深部脑区神经接口精准创成,微纳机器人正在将科幻小说中的场景变为现实。报告将介绍近年来研究团队在微纳机器人技术领域的探索与进展,内容涵盖设计理论、驱控技术及应用研究等方面。并结合具体研究案例,重点介绍微纳机器人在靶向药物递送、柔性脑机接口植入等生物医学应用中的技术创新和实践验证,展示这一前沿技术在推动精准医疗发展中的重要价值。通过对技术发展趋势和应用前景的探讨,为微纳机器人技术的进一步发展和临床转化提供思路。
个人简介:
哈尔滨工业大学/机器人技术与系统全国重点实验室, 教授、博导,国家杰出青年科学基金获得者。主要从事微纳机器人技术及应用研究,在微纳机器人精密操控、药物靶向递送、高性能柔性脑机接口创成方面取得重要成果。近年来,主持国家重大科研仪器专项、国家重点研发计划项目、国家杰出青年科学基金等20余项,获省部级科技奖项3项,代表性成果刊出在Science Robotics、Nature Communications、Science Advances等著名期刊。任多个国际/国内期刊编委、中国微米纳米技术学会微纳机器人分会副理事长、自动化学会机器人专委会副主任委员等职务。

王学谦
清华大学深圳国际研究生院 教授
报告题目:
绳驱机械臂技术及其应用展望
报告内容简介:
随着空间技术的发展,在轨服务、装配和制造受到了国内外研究者越来越多的重视,而空间智能机器人以其精细操作、多功能、灵巧等能力扮演者极为重要的角色。目前,空间刚性机械臂的发展已经较为成熟,但在面对非结构性的复杂环境时却仍然有许多困难。另外,人机交互的安全性也是一个重要的考量。基于这些原因,研究人员自上世纪五六十年代开始关注超冗余柔性机械臂和连续型柔性机械臂的研究。柔性机械臂是一类具有较多甚至无限自由度的,区别于传统刚性机械臂的新型机械臂。柔性机械臂多基于仿生原理研发,具有灵活性强、能够适应复杂环境、人机交互安全等特点。本报告主要介绍绳驱机械臂的研究进展,以及未来的应用展望。
个人简介:
清华大学深圳国际研究生院长聘教授,博导。主要从事智能机器人研究,包括机器人动力学与控制、遥操作、智能决策与博弈、故障诊断等。现为数据与信息研究院党总支书记,深圳空间机器人技术及遥科学重点实验室主任、国家级人才、2023年度深圳十大杰出青年。曾获国家科技进步特等奖1项,省部级科技进步一等奖2项,省部级发明一等奖1项。在空间机器人领域出版学术专著4部,发表学术论文200余篇,授权发明专利100余项。

顾红日
香港科技大学 助理教授
报告题目:
微尺度智能集群:微型机器人如何学会协同工作
报告内容简介:
自然界中的小型个体能完成超出其自身规模的非凡壮举,例如蚂蚁能举起远超过自身重量的猎物,驱动蛋白能通过细胞骨架运输囊泡。然而,要将这些协作原理转移到微米尺度,需开发新的控制范式,以应对布朗噪声、紧密的物理耦合以及严苛的硬件限制。本报告将介绍一种激光控制的集群系统,最多可同时控制200个Janus微型机器人(直径6微米),并通过多智能体强化学习(MARL)优化个体行为。通过在每个时间步虚拟地“移除”某个机器人并评估其边际贡献,构建一种反事实奖励机制;这种奖励分配策略有效地解决了“懒惰智能体”问题,加快了训练速度,并在热扰动和货物与机器人之间不可预测的相互作用下,形成稳健的集体决策。通过学习的决策策略,该机器人集群可实现聚集、对齐和搬运比单个机器人重一个数量级的棒状货物,并能在机器人损失时自适应地重新配置。通过融合仿生机械与基于学习的自主控制,本研究推动了能思考、协作并最终在人体内运输药物的微型机器人集群的发展。
个人简介:
现任香港科技大学综合系统与设计学部助理教授。他于2009年至2014年在浙江大学攻读机电工程专业。本科期间,他于2012年至2014年参加了东京工业大学的青年科学家交流计划。之后,他进入苏黎世联邦理工学院(ETH Zurich)微纳系统硕士项目,并于2016年毕业。2017年至2021年,他在苏黎世联邦理工学院多尺度机器人实验室(导师Brad Nelson教授)进行博士研究。2022年至2024年,他在德国康斯坦茨大学物理系从事博士后研究。
他的研究致力于开发结构化磁性材料和机器人系统,以实现未来颠覆性的医疗技术,并通过研究多尺度的生理传输,发明新型医疗器械和手术工具。

李 辉
北京理工大学 副教授
报告题目:
空间管道检测机器人
报告内容简介:
2025年初,由北京理工大学牵头,联合北京空间飞行器总体设计部、北京卫星制造厂有限公司共同研制的空间管道检测机器人在我国空间站成功完成了国际上首次空间管道检测机器人在轨试验。本报告主要介绍该空间管道检测机器人的研制历程、设计思路和关键技术。
个人简介:
北京理工大学机电学院副教授、博导。长期从事空间机器人研究,参与研制的空间管道检测机器人,在我国空间站完成了国际上首次管道机器人在轨试验。担任国家卓誉期刊Space: Science & Technology编委,以第一/通讯作者在IEEE Transactions on Robotics等机器人领域期刊发表论文20余篇。

王乾乾
东南大学教授
报告题目:
医工交叉外场驱控微机器人系统设计与构建
报告内容简介:
微型化和集成化是机器从机械化、电气化、信息化、向智能化方向发展的必然要求。微机器人是指尺度在毫米、微米甚至更小量级,能够将外界能量转化为动能,从而在微小尺度实现自主运动及可控作业的微小机器。其小体积、高灵活度、无线驱动等特性赋予了微机器人在狭小环境中精准导航和作业的能力,因此可以实现传统手段无法完成的任务,特别是在微尺度靶向药物递送与精准介入等高精尖领域具有颠覆性意义和重要应用潜力。微机器人研究是当今科技发展的热点方向之一,已多次入选科技部“智能机器人”重点专项及中国年度十大科学问题。在本次报告中,报告人将从医工交叉微机器人系统构建的角度,逐步介绍外场驱控微机器人系统的设计和控制方法,并讨论微机器人集群在医学诊断和治疗应用的研究进展和未来的热点研究方向。
个人简介:
东南大学青年首席教授、博导,机械工程学院副院长,省重点实验室管委会主任。入选国家高层次青年人才,荣获东南大学青年五四奖章。入选首批小米青年学者,获中国电子学会科学技术奖自然科学二等奖1项,MINE优秀青年科学家奖获得者,全球Top2%顶尖科学家。近年来发表高水平一作/通讯论文30余篇,包括Science Robotics、Science Advances、IEEE Transactions等,多篇文章入选ESI高被引论文、热点论文;在IEEE ICRA、IROS 等顶会发表多篇论文并做报告和主题研讨;研究成果获人民日报、Nature News、香港创新科技署等国内外科研院所及专业机构的报道,并入选“香港十大创科新闻”。担任IEEE T-ASE 编委、IEEE IROS、ICRA等多个国际顶会编委,《机械工程学报》、Int.J.Extreme. Manuf.(极端制造)、SmartBot等期刊青年编委。出版机器人英文专著2部。

孔 贺
南方科技大学研究员
报告题目:
基于全驱系统方法的欠驱控制
报告内容简介:
欠驱系统的控制一直以来是机器人与自动化领域的重要课题。现存的欠驱控制方法大多依赖于状态空间方法,在实践中面临着控制器设计复杂及无法有效处理不确定性的弊端。全驱系统方法因其能有效处理非线性和面向控制器设计的特点,为欠驱动系统的控制提供了新的思路和可行性路径。本报告中,我们将以几类典型的欠驱系统为例(平衡立方体、起重机、燃料电池空气供给系统等),初步探讨全驱系统方法的欠驱控制应用,并用真实实验结果探讨全驱系统方法的在抗干扰方面的独特优势。
个人简介:
南科大研究员,博士生导师,南科大-机器人研究院副院长。本、硕、博分别毕业于中国矿大、哈工大、澳大利亚Newcastle大学,曾在悉尼大学野外机器人研究中心开展博士后研究。入选国家海外高层次人才青年项目。近三年主持获批国自然-原创探索计划项目(首年结题优秀,并获延续资助)、国自然-联合基金重点项目、国家重点研发计划-智能机器人重点专项课题;广东省重点实验室、深圳市重点实验室、深圳市孔雀团队计划核心成员。主要致力于机器人的多模态感知及融合、最优滤波与参数辨识、机器人与航天器控制、野外机器人系统与技术等方面的研究。曾获2019年IFAC 1st Workshop on Robot Control最佳青年论文提名奖、2024年第五届中国机器人学术年会最佳海报奖、2024年14th International Conference on Indoor Positioning and Indoor Navigation最佳论文奖。担任IEEE Robotics and Automation Letters、IEEE Robotics and Automation Magazine、IEEE Sensors Letters、International Journal of Adaptive Control and Signal Processing副主编、《信息与控制》青年编委以及机器人领域多个主流会议副主编。

张 壮
复旦大学研究员
报告题目:
多模态主被动机械触感交互
报告内容简介:
在人类五感中,触觉在环境感知和交互操作中起着至关重要的作用。相比以视听觉为主的现有虚拟现实与元宇宙技术,触觉的引入将大幅提升用户的沉浸感和真实感,也将大幅提升机器人遥操作的信息反馈维度。然而,现有触感交互装置在多样性和真实度上仍然存在明显不足,与用户的日常触觉体验相差甚远。如何在实现多模态触感的同时,高保真度复现日常生活的真实体验,是当前学界与业界的难题,也是制约触感交互设备广泛应用的关键问题之一。本次报告将从主动触感和被动触感两个层面,围绕多模态、高保真触感的机器人系统实现,介绍本团队近期在柔性结构设计、刚度调控、刚柔耦合多模态驱动单元等方面的技术进展,展示所开发触感交互装置的设计原理、功能性能以及应用前景。
个人简介:
复旦大学“青年英才”研究员、博士生导师,2021年于上海交通大学获得博士学位,随后于西湖大学开展博士后研究,并于新加坡国立大学等海外高校开展访问研究。研究方向包括多模态触觉感知与反馈交互、折纸/剪纸机器人与超材料、柔性与刚柔耦合驱动器及机器人系统等。近五年以第一/通讯作者于Nature Machine Intelligence, Nature Communications, Science Advances, IEEE Transactions on Robotics等国际权威期刊发表论文15篇,担任IEEE RA-L, ICRA, Advanced Science, Cyborg and Bionic Systems, Soft Science等期刊与顶会的副编/客座编辑/青年编委,以及ICCBS,SES,RoboSoft等多个国际学术会议与研讨会的组织者。曾获中国十大新锐科技人物创新贡献奖、IROS New Generation Star等荣誉奖项。
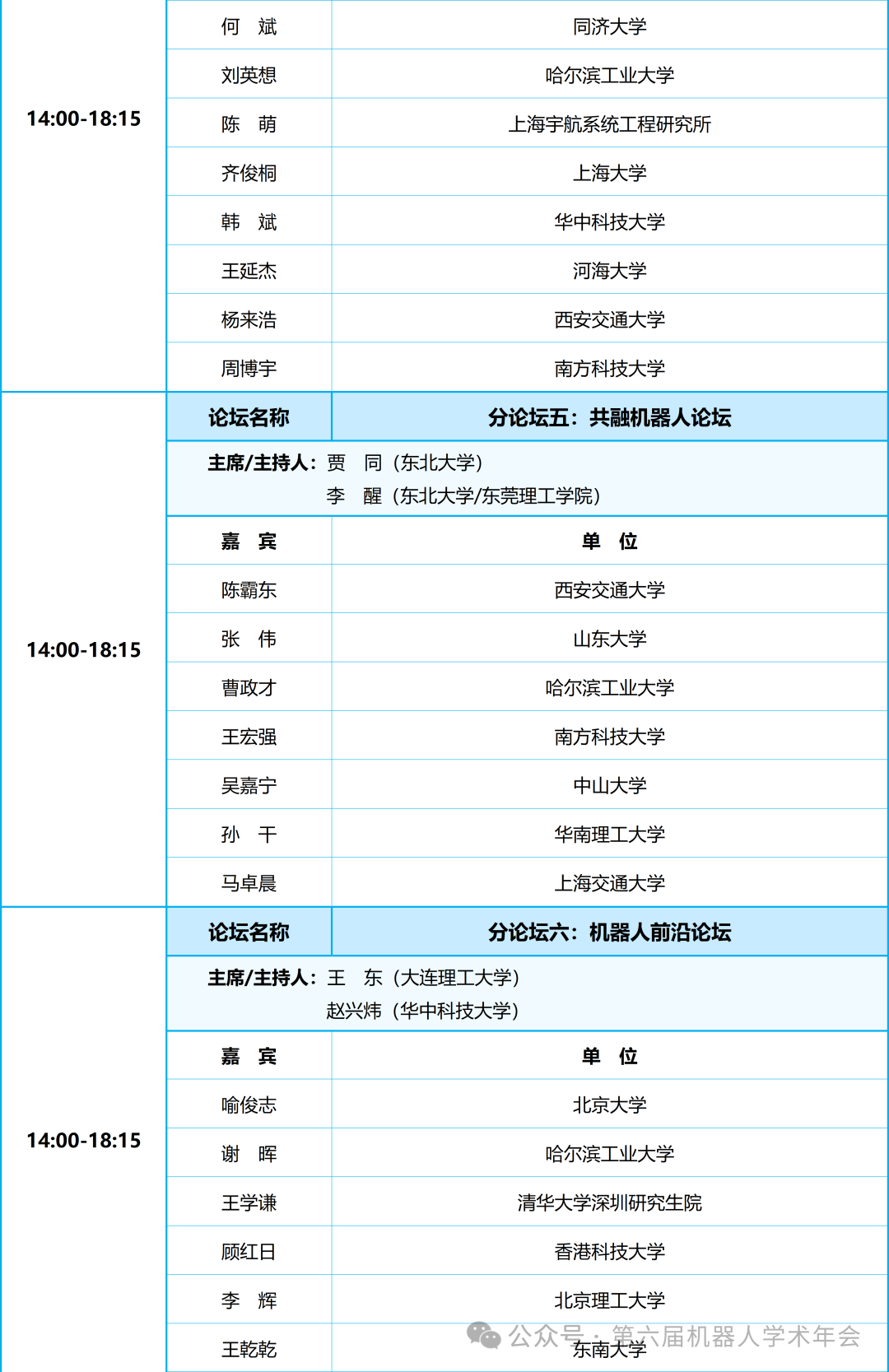
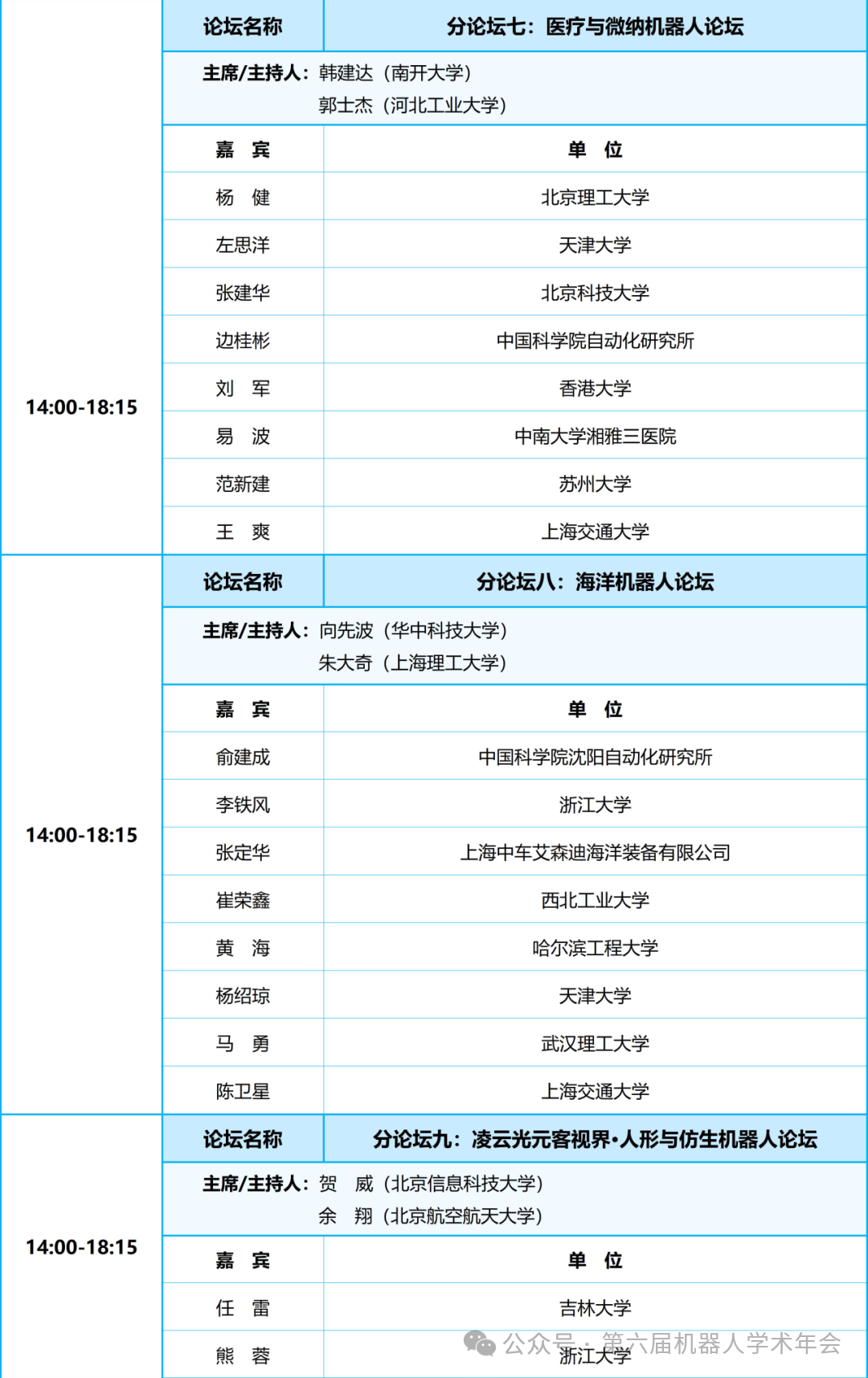
▍论坛安排

▍日程总览

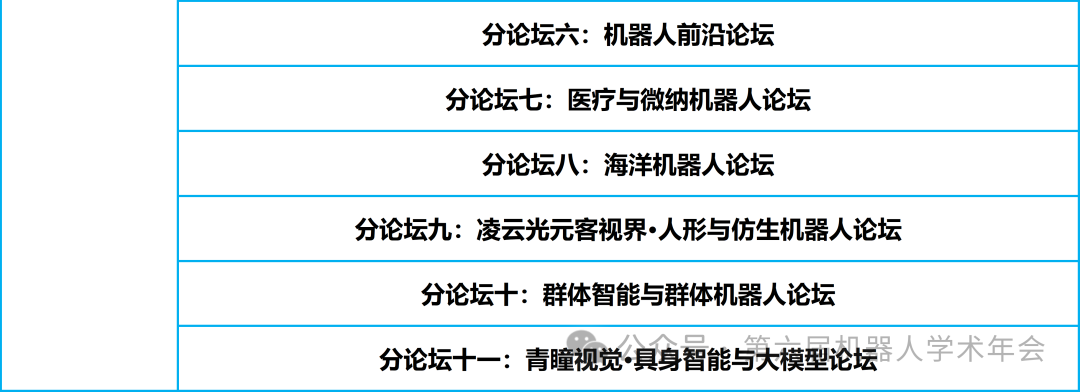
*具体日程将陆续在会议官网发布与更新。
▍大会日程

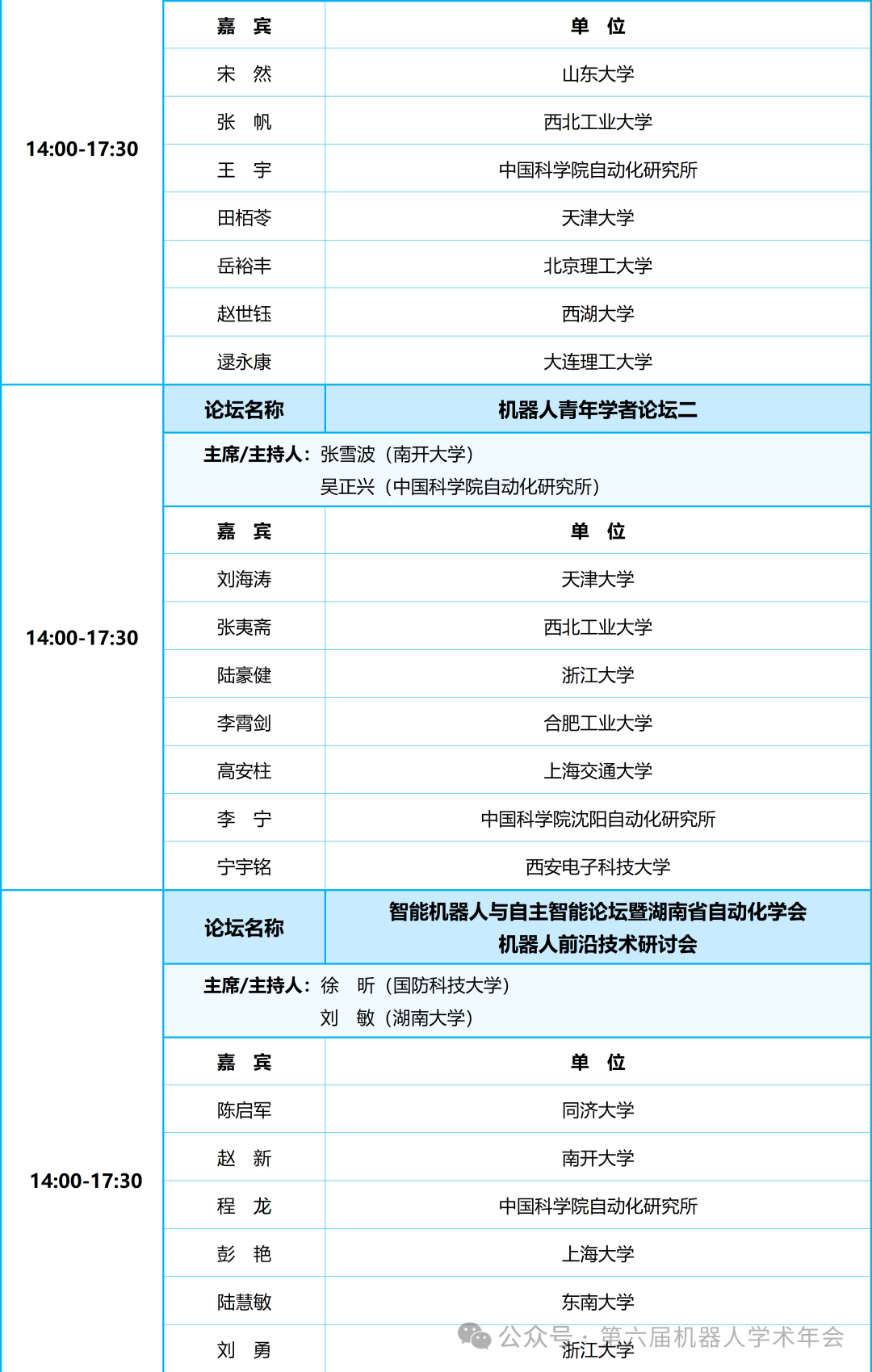
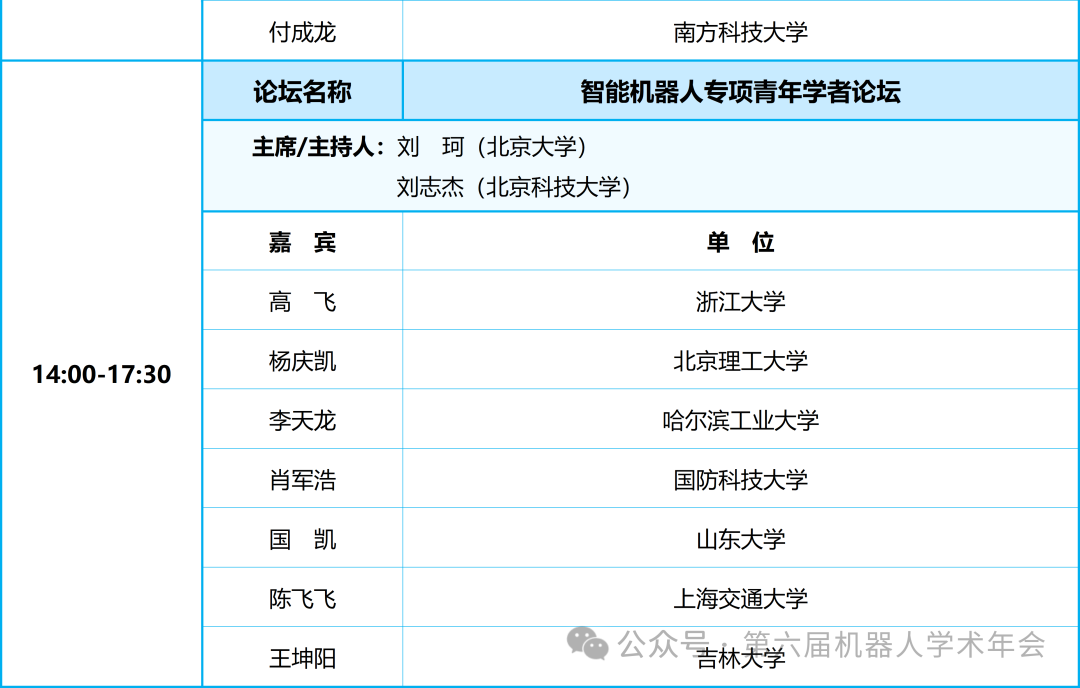


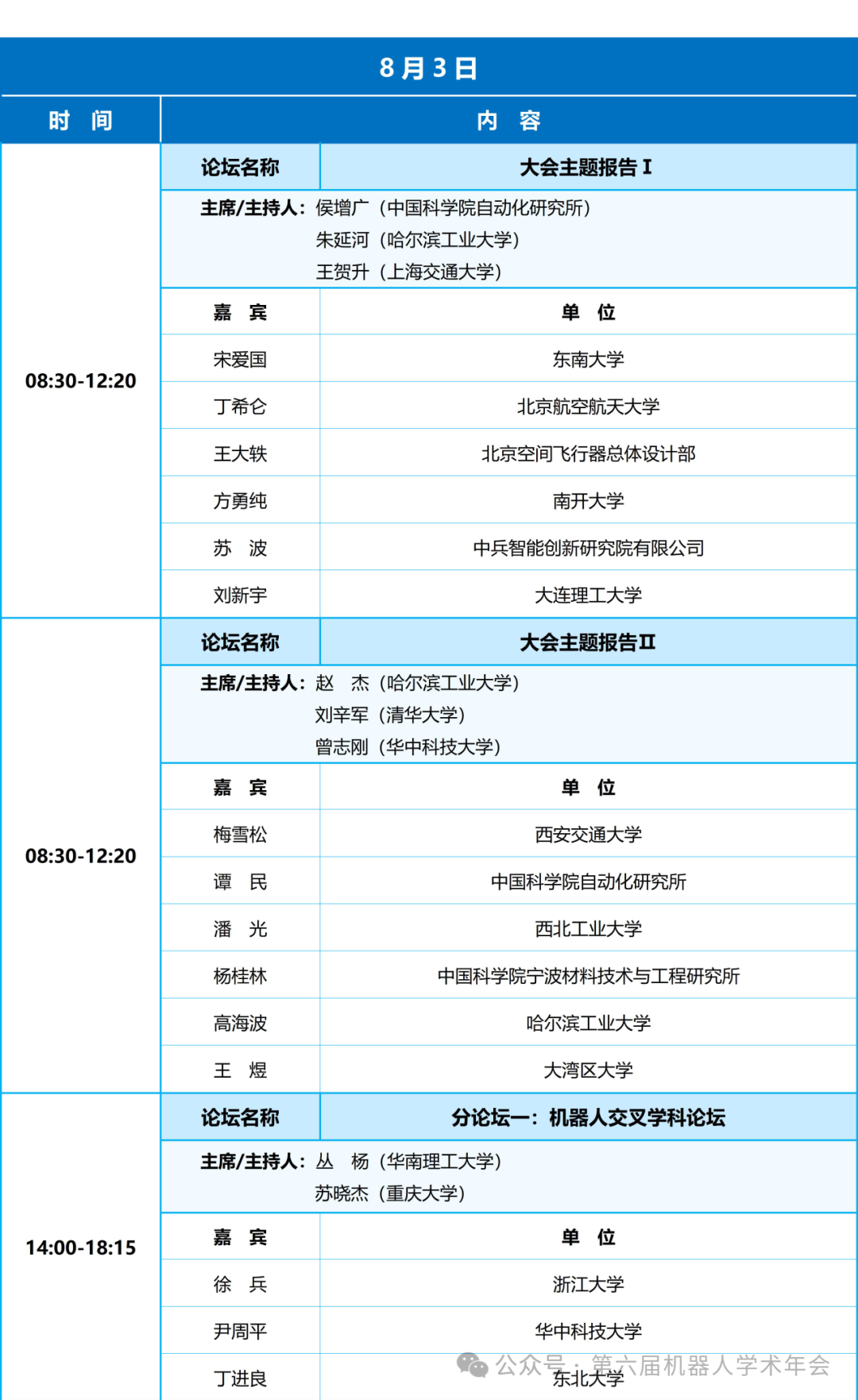



*会议日程以会议举办时为准,大会组委会拥有最终解释权。
▍大会交流群

▍注册通知
缴费标准
注册类型 | 线上注册 |
非学生 | 2500元 |
学生 (须上传学生证) | 1500元 |
①“学生”为全日制在校学生,不含非全日制研究生和博士后,注册须提供学生身份证明。
②会议秘书联系方式:
梅 杰:18811475184
牛通之:13170479835
黄秋艳:18175100917
邮 箱:ccrs2025@126.com
●会议时间:2025年8月1日-3日
●会议地点:长沙国际会议中心(湖南省长沙市长沙县国展路)
缴费方式
可通过电脑端或手机端完成注册缴费
(1)电脑端请通过以下链接进行注册:
http://www.ccrs6.com/
(2)手机端请通过以下二维码进行注册:

缴费方式支持微信支付、银行转账汇款两种方式。
银行转账汇款账户信息:
账户名:长沙领空科技有限责任公司
账 号:583383127508
开户行:中国银行股份有限公司长沙市湖南大学支行
备注:如选择银行转账汇款注册方式,请务必在办理汇款时附言注明“CCRS2025+参会人姓名”,汇款完成后上传付款凭证截图(登录个人中心-注册缴费-上传汇款底单)。
注意事项:
● 电子发票将于会前一周开具并发送至联系人预留邮箱。
● 会议通知请点击下方下载:
会议退费政策
*如需退费,请联系会议秘书或者发送姓名、单位、手机号码、邮箱等信息到ccrs2025@126.com。
*退费申请审核通过后,开具的电子发票将作废,请勿使用。退费将在会后开始办理,手续费开会务费发票。
▍组织机构

▍合作单位

来源:第六届机器人学术年会
如需咨询企业合作事宜,欢迎联系堂博士(13810423387,手机与微信同号)进行对接。
----------------END-------------------

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 非夕科技 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 盈连科技 | 集萃智造 | 优傲机器人 | CGXi长广溪智造 | 阿童木机器人 | 极智嘉
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康 | 迪视医疗 | 水木东方
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 中科深谷 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 理工华汇 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 擎朗智能 | 戴盟机器人| 视比特机器人| 星海图
核心零部件企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 锐驰智光 | NOKOV度量科技 | 因克斯 | 褔德机器人 | 巨蟹智能驱动 | 微悍动力 | 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态,添加微信“robospeak2018”入群!

看累了吗?戳一下“在看”支持我们吧
 扫码添加微信
扫码添加微信

- 点赞 (0)
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊







