


《计测技术》推荐文章|中国计量大学罗哉教授团队:六自由度机器人末端位姿校准误差链路分析
- 2025-07-30 11:35:00


导读

近期,中国计量大学罗哉教授团队江文松副教授研究了校准误差对六自由度机器人末端定位精度的非线性影响,开展了机器人末端位姿校准误差链路分析。研究成果为机器人末端精准定位控制提供技术参考。
六自由度机器人末端位姿校准误差链路分析
作者:江文松1,王妍1,罗哉1*,冯思琪1,杨力1*,张鹏浩2
作者单位:1.中国计量大学计量测试与仪器学院;2.中国航空工业集团公司北京长城计量测试技术研究所
摘 要:为研究校准误差对机器人末端定位精度的非线性影响,开展六自由度机器人末端位姿校准误差链路分析。采用修正的DH模型(Modified Denavit⁃Hartenberg Model, MDH)约束条件建立六自由度机器人的运动学参数模型,分析末端位姿变换的空间几何特征关系;分析机器人校准误差的来源,得到测量系统各坐标系之间的函数关系,构建机器人末端位姿校准误差传递链路模型。搭建六自由度机器人校准系统开展实验,结果表明:机器人末端校准误差主要来源包括连杆长度误差、关节偏移误差、关节扭转角误差和零位误差等,合成后的校准误差为2.66 mm;机器人末端x、y、z方向的相对不确定度分别为0.09%、0.37%、0.46%。研究成果为机器人末端精准定位控制提供了技术参考。
关键词:几何量计量;机器人;末端定位;校准;误差链路分析
文章主要内容

本文建立了六自由度机器人几何参数误差模型,分析了机器人各轴运动学参数校准误差影响因素,研究了机器人最小二乘参数估计偏离对模型应用效果的影响机制。利用AR5机器人开展实验,测量机器人不同位形下的末端位姿数据,计算得到各轴的运动学参数,并评定机器人末端位置不确定度。选取机器人关节角度[27.631°,52.012°,-53.035°,-175.681°,66.936°,3.158°]作为研究位形,激光跟踪仪测得该位形的末端位置坐标为[748.650 mm,325.837 mm,330.842 mm]。
不同维度的机器人末端位置分布如图1所示,横坐标为末端位置分布范围,纵坐标为该范围内观测值的出现频次。通过图1(b)可以观察到,末端位置的y轴分布近似高斯分布,随着分布值向两侧偏离,频次逐渐减少,说明末端位置在极端高或低的频次出现的概率较低。
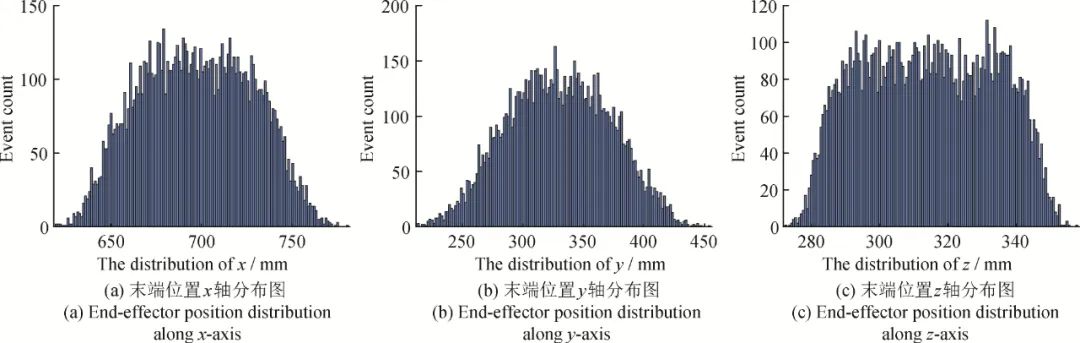
图5 不同维度的机器人末端位置分布图
Fig.5 End⁃effector position distribution diagram for the manipulator in different dimensions
结合链式模型进行计算,得到不同LM参数的机器人末端位置分布如图2所示,横坐标表示不同LM参数对应的末端位置分布范围,纵坐标表示该范围内对应值的出现频次。
对比不同维度和不同LM参数对机器人末端定位精度的影响并进行分析,结果表明:不同维度对机器人末端位姿的误差影响较为显著,末端位置在x、y、z轴方向的误差分布分别为[619.814 mm,777.347 mm]、[212.606 mm,447.587 mm]、[272.571 mm,355.895 mm],末端位置在x、y、z轴方向的平均值分别为[698.127 mm,329.872 mm,314.108 mm]。

图6 不同LM参数的机器人末端位置分布图
Fig.6 End⁃effector position distribution diagram for the manipulator under various LM parameters
结论

作者简介


江文松(1988-),男,副教授,博士,主要研究方向为飞机结构健康监测、反问题建模及优化、动态校准。

罗哉(1979-),男,教授,博士,主要研究方向为汽车零部件检测精密测试技术、视觉与激光测量、定位导航与建图、数字化三维成像。

杨力(1979-),男,副教授,博士,主要研究方向为机器学习(深度学习)、虚拟现实与数字孪生、计算机视觉、机器人。
科研团队介绍

中国计量大学“跨尺度几何量测量技术及仪器”登峰学科团队
团队负责人:罗哉(教授)
主要成员:江文松(副教授),杨力(教授),崔长彩(教授),程银宝(副教授),何亚雄(讲师),卞点(助理研究员),李亚茹(助理研究员),王妍(博士研究生)。
研究方向:无人系统建模与智能化,三维测量与数字化技术,半导体器件测试技术。
全文链接

六自由度机器人末端位姿校准误差链路分析(点击查看)
引用格式:江文松,王妍,罗哉,等. 六自由度机器人末端位姿校准误差链路分析[J].计测技术,2025,45(2): 48-55.
往期文章推荐

线性运动平台多自由度几何运动误差测量技术(点击查看)
作者:蔡引娣, 王路辉, 高英豪,范光照
关键词:线性运动平台;多自由度运动误差;激光测量;半导体激光器
基于多基站激光跟踪仪的机器人位姿精度测试方法(点击查看)
作者:陈章位,祖洪飞,洪伟,毛晨涛
关键词:机器人位姿测试;多基站测量;激光跟踪仪;转站精度;非线性最小二乘法
工业机器人校准技术与补偿方法发展现状及趋势(点击查看)
作者:宫思远, 赵子越, 刘倩頔
关键词:工业机器人;校准技术;校准模型;绝对定位精度
动态力计量建模与分析方法综述(点击查看)
作者:江文松, 吴娅辉, 李新良, 王中宇, 张力
关键词:计量;系统建模;数据评价;溯源;动态力
供稿:江文松、王妍
编辑:刘圣晨、刘宇轩
排版:马鹤伟
审核:韩冰

长按识别二维码,加入
计量检测学习交流群!!!


 扫码添加微信
扫码添加微信








