


激光感知技术路线(LiDAR-based Perception)
- 2025-07-29 17:31:09
总目标
掌握从原始点云处理、障碍物感知、激光建图到三维定位等LiDAR核心感知能力,可独立构建基于激光的环境感知与导航系统。
阶段一:点云基础与预处理(1–1.5个月)
学习目标:
理解LiDAR数据结构与处理流程,掌握点云清洗、滤波与降采样等基础操作。
核心知识点:
点云格式:PCL .pcd、ROS .bag 格式
点云结构与坐标系(雷达、相机、世界)
滤波与降噪:
Voxel Grid(体素降采样)
Statistical Outlier Removal(统计滤波)
PassThrough Filter(范围裁剪)
工具平台:
PCL(C++/Python绑定)
Open3D(简洁Python接口)
ROS点云消息处理(sensor_msgs/PointCloud2)
实战任务:
加载 Velodyne 点云数据并完成体素降采样
实现异常点剔除 + 范围约束裁剪
可视化降采样效果对处理效率与精度的影响
推荐资源:
《Mastering PCL》开源电子书
Open3D官方教程:https://www.open3d.org/docs/
ROS点云教程:http://wiki.ros.org/pcl/Tutorials
阶段二:点云分割与空间结构理解(1.5–2个月)
学习目标:
实现环境结构理解,如地面分割、障碍物聚类与空间语义分析。
核心知识点:
地面提取与障碍物分割
RANSAC平面拟合
Elevation Filtering(高度阈值)
点云聚类算法
DBSCAN(基于密度)
欧式聚类(Euclidean Clustering)
深度学习点云分割(入门)
RangeNet++、PointNet/PointNet++
工具平台:
PCL Segmentation模块
Open3D聚类与RANSAC接口
PyTorch + OpenPCDet/RangeNet++框架(进阶)
实战任务:
地面平面提取 → 障碍点聚类 → 3D bounding box
激光雷达实现目标计数/车道检测等几何任务
用RangeNet++实现KITTI点云的语义分割(进阶)
阶段三:点云配准与三维地图构建(2个月)
学习目标:
掌握不同帧点云之间的匹配与对齐方法,实现三维地图累积与实时更新。
核心知识点:
点云配准算法
ICP(迭代最近点)
GICP(加入协方差权重)
NDT(分布对齐,适用于复杂场景)
多帧拼接:帧间变换估计与累计
地图表示方式
Occupancy Grid Map(占据栅格)
OctoMap(八叉树)
Elevation Map(用于地形建模)
工具平台:
PCL registration 模块
OctoMap ROS插件 / Elevation Mapping (ANYmal)
Open3D ICP 接口
实战任务:
使用ICP对两帧点云进行精配准并可视化
运行OctoMap生成建筑/室外环境三维地图
利用多帧融合构建精细的地形高度图
阶段四:激光定位与SLAM系统整合(2–3个月)
注:此处强调激光建图定位的应用,弱化室内SLAM复杂图优化环节,可更关注定位 + 实时可用性
学习目标:
部署LiDAR定位模块(不依赖全视觉),构建可适用于室外场景的自定位系统。
核心内容:
激光里程计与建图:
LOAM(经典高精度激光里程计)
LeGO-LOAM(轻量+地面优化)
Cartographer(Google 2D/3D激光建图方案)
配准 + 回环检测 + 位姿图维护(可选)
多传感器同步(与IMU/GNSS配合)
工具平台:
LOAM / LeGO-LOAM ROS版本
Google Cartographer with ROS
KITTI / nuScenes 数据集测试
实战任务:
在ROS中部署LeGO-LOAM并记录雷达轨迹
比较ICP + LOAM + NDT在定位精度与计算效率上的表现
与RTK GPS结合实现自动驾驶/农机场景下的导航定位系统
阶段五(可选):多模态融合与感知增强(进阶)
学习目标:
整合RGB与LiDAR数据,实现更加稳健的感知与地图语义建构。
核心内容:
点云与图像的配准(外参标定)
点云颜色融合(点着色)
图像引导的语义建图(如SemanticFusion、PanopticFusion)
LiDAR + 相机 + IMU 多传感器SLAM
推荐工具:
Open3D多模态接口
ROS tf2 + calib_cam_to_lidar
SemanticKITTI数据集
实战任务:
车载激光雷达点云与图像同步 → 彩色点云渲染
LiDAR检测 + 相机语义标签 → 语义地图构建
GNSS/IMU + NDT 实现高鲁棒外部环境定位
全流程示例项目推荐

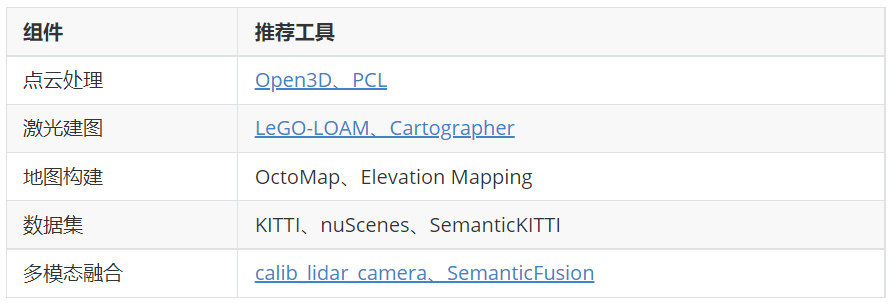
附推荐开源项目与工具


 扫码添加微信
扫码添加微信

- 点赞 (0)
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊







