RoboTwin 2 学习小组
- 2025-07-25 17:29:11

主办方:Xbot具身智能开发者联盟
我们将启动 roboTwin 2 仿真平台学习小组,目标是系统掌握双臂机器人仿真数据采集、策略生成与评估流程,预计规模约 50 人。

roboTwin 2 环境配置与运行(含 Docker 支持、GPU 加速等)
下载 RoboTwin‑OD 资源库(731 个物体实例,147 类)进行资产管理 (robotwin-platform.github.io)
50 个双臂基础任务运行与验证
基于多模态 LLM 的专家数据生成与回放机制
结构化领域随机化实操(杂乱场景、灯光、背景、语言说明等)(robotwin-platform.github.io)
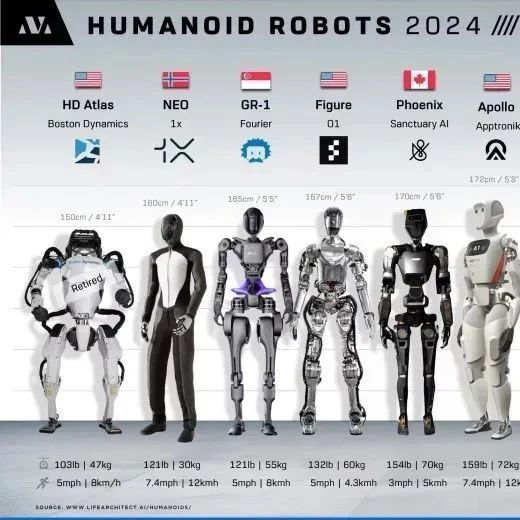
多机器人平台适配(支持 5 种平台形式)(如 Aloha、Franka、UR5 等)
实战任务:如 pick‑dual‑bottles、stack‑bowls、handover‑block 等
VLA 策略微调与零样本评估、robust 性能测试


有 Python、机器人仿真、AI 模型基础的工程师/研究者
希望深入实操双臂仿真平台并贡献开源或从事落地研究的同学
有意复现 roboTwin 2 策略模型,用于学术或工业项目
报名时间:即日起至本周五,限 50 人
学习方式:线上文档 + 小组互助 + 每周打卡与成果分享
后续活动:专题直播 + 答疑会议 + 极速入门指导

完成基础环境配置后请截图联系我报名
有意者请私信加入,备注“roboTwin学习报名”



roboTwin 2 是一个可生成高质量、可扩展双臂操作数据集的仿真框架 (arXiv, robotwin-platform.github.io)
RoboTwin‑OD 包含 731 个实例、147 类,多模态标注 + 结构化领域随机化设计 (robotwin-platform.github.io)
预采集超过 10 万条经验轨迹,并支持 50 个任务与 5 个机器人平台评估 (robotwin-platform.github.io)
如需协助准备环境、复现基准、策略编写或开源贡献,欢迎随时联系我~
期待你的加入,一起玩转双臂仿真!

 扫码添加微信
扫码添加微信
- 点赞 (0)
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊