


3D结构光扫描仪的狂飙!揭秘精迅V2如何实现微米级重建精度
- 2025-06-23 07:00:00
一 产品介绍
3d结构光主要针对“漫反射”物体进行三维重建,常用于机械臂抓取、视觉测量、缺陷检测等领域。目前主流结构光技术有:散斑结构光(机器人导航)、线结构光(视觉测量)、面结构光技术(机械臂抓取等快速测量场景)。我们推出了“精讯V2”设备,是一台面相科研级的高速、高精度、源码级开发的3d面结构光测量设备,能够自由DIY配置,并且与机械臂等结合,开发相应的应用。
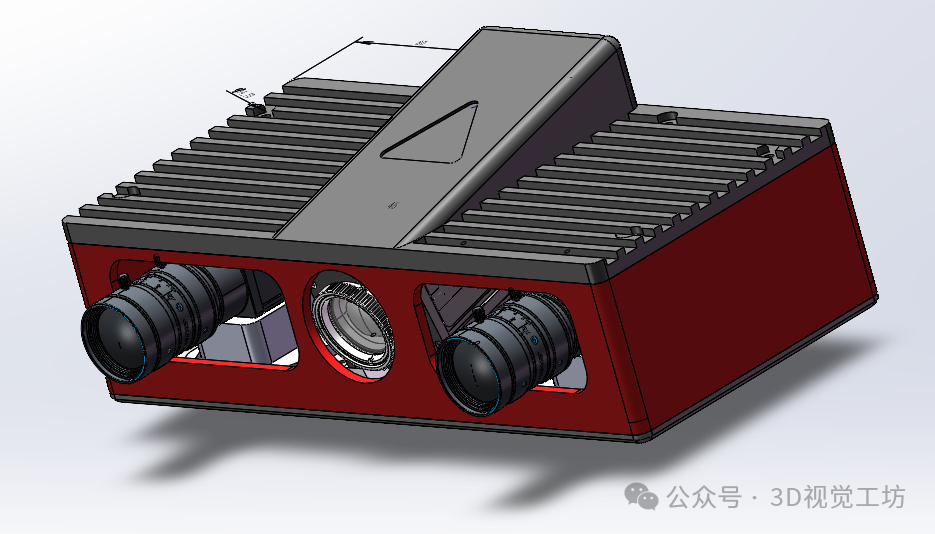
二 相比精迅V1,硬件做了哪些升级?

三 产品性能

四 重建耗时

五 源码模块
本套硬件提供的配套源码功能如下:
5.1 硬件控制模块源码
完整的相机和投影仪的控制功能:
相机:设置曝光时间、拍照
写入投影图案、同步触发相机拍照
5.2 算法模块源码
整套结构光技术相关算法
相移条纹:相移法+互补格雷码的条纹生成、解码程序 单目重建:标定、重建、畸变校正、点云显示 双目重建:标定、重建、畸变校正、点云显示 Gamma: Gamma校正程序,有效地降低非线性误差 HDR算法:多重曝光HDR算法,有效应对高反光重建场景 源码软件界面展示
对比精讯V1版本,硬件/算法升级的部分如下:
更稳定的硬件控制,异步存取图片,最高投影帧率60FPS。 更方便、高精度的单目标定/重建算法,只需要单方向条纹,即可完成标定、重建、畸变矫正。 自动化点云处理:可以自动化处理扫描后的点云 更完善的界面交互程序
六 软件介绍

相比较精讯V1,主要提升如下:
界面升级 将硬件控制、系统标定、三维重建集成在一个界面,更便于使用。
点云处理
可以手动设置滤波参数,自动化处理点云。
更高精度
相机分辨率升级到200万(最高支持2000万像素),并且使用更高精度的单目标定重建算法,大幅提升单目重建精度。
HDR算法
优化HDR高动态合成算法,轻松应对大多数高动态范围(铝合金、黑色背景)等测量场景。
拓展性
源码级开放,支持OpenCV、Halcon、VisionMaster等各类主流机器视觉库二次开发。
AI开发
可以结合OpenCV部署各类AI应用,如6d姿态抓取等,结合我们工坊推出课程,可以完成大多数3d视觉领域的任务。
从零开始,源码级教学!
七 重建效果展示







八 购买本套硬件,将会配套赠送哪些课程?
8.1 课程1:结构光三维重建高阶班专属视频课程+课件
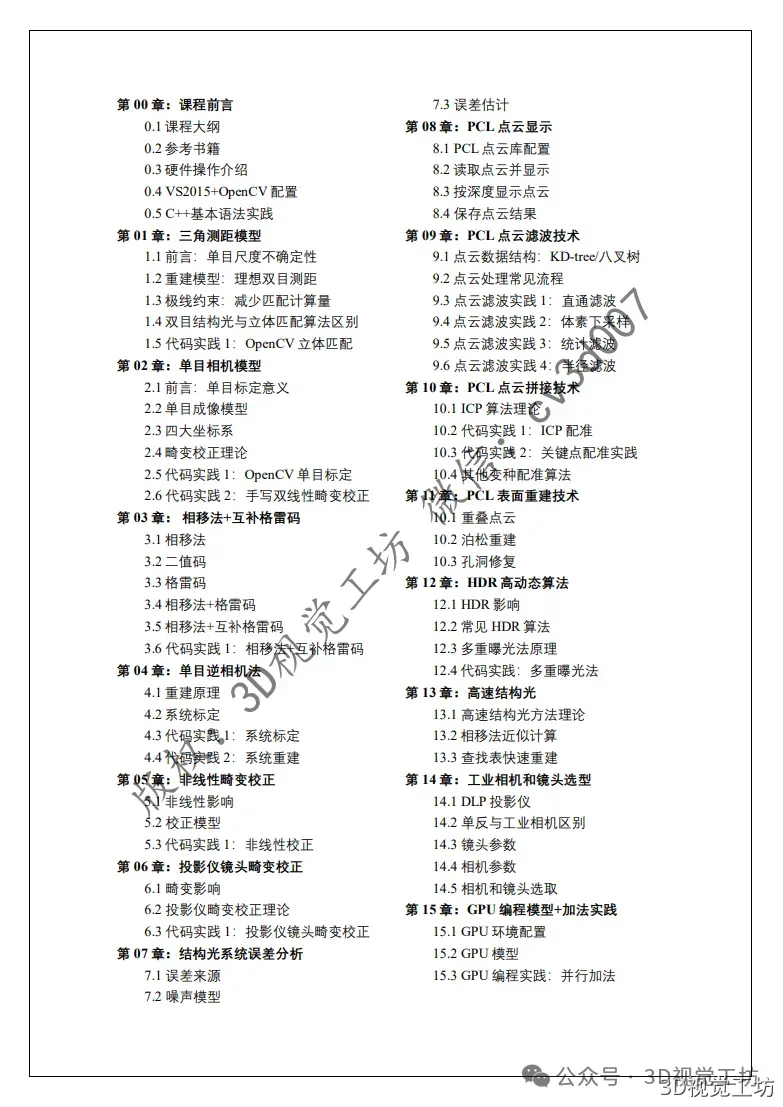
8.2 课程2:三维点云高阶班专属视频课程+课件

九 答疑服务
一年答疑服务。每个购买本产品的客户,我们将会拉一个微信答疑群,有问题可以随时群里交流。问题可以涵盖本套硬件和代码方方面面的问题。
十 产品采购渠道


声明:本文内容及配图由入驻作者撰写或合作网站授权转载。文章观点仅代表作者本人,不代表科技区角网立场。仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
点击这里
 扫码添加微信
扫码添加微信
扫码添加微信
- 点赞 0
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊







