


厘米级精度覆盖万平大场景?这款3D空间扫描仪凭什么实现20万点云/秒的重建?
- 2025-07-12 00:00:00
产品介绍
ScanBot-X1是苏州三迪斯维推出的一款三维空间扫描仪,机身搭载RTK、激光雷达、双广角相机、高精度IMU、微秒级同步模组、自带计算单元、触控屏和快拆充电手柄。每秒20万级点云成图,360度水平视角覆盖,70m最远测量距离,厘米级精度控制(±1.5cm),支持超20万平米大场景重建,可选配3D高斯数据采集模块,实现高保真实景还原。ScanBot-X1如图1~2所示。


产品参数
ScanBot-X1采用轻量化设计,整机重量1.3kg,支持跨平台协同,可适配无人车、无人机、机械狗、人形机器人等移动平台,扫描结果可实时查看。机身预留高带宽网口,支持组网模组集群拓展,预留两个USB3.0口,扫描结果导出即用,相关参数如表1~7所示。







产品特点
支持二次开发
ScanBot-X1是支持二次开发,机身预留了一个高带宽网口、2个USB 3.0口,支持组网模组集群拓展,适配不同使用需求,并搭配相关教程,可适配多种开源方案,目前适配开源算法如表8所示。

其中Fast-LIVO/Fast-LIVO2、Fast-LIO2、Point-LIO提供完整的教程,其余直接参考官方GitHub部署即可。
多传感器微秒级同步
搭载多年自研的多传感器融合SLAM算法和超高精度IMU模块,采用先进标定校准技术、微秒级数据同步技术(如图4所示),轻松应对复杂室内外场景,全方位满足测绘需求。

多模态数据采集
支持快速建图、稠密建图和彩色建图三种不同的数据采集模式。
实时3D建图、支持超20万平米大场景重建
搭载高精度多传感器SLAM建图算法,实时输出高精度点云数据,结合高清赋色相机,可生成色彩丰富的彩色点云数据。支持超20万平米大场景实时扫描,结果实时查看,支持彩色融合。
可选配3D高斯模块
可选配3D高斯模块,实现高保真实景还原,将真实世界以数字化形式完整复刻,如图5所示。

产品性能
ScanBot-X1依托多模态传感器融合算法,胜任各类室内外复杂场景,在写字楼、停车场、工业园区、各类隧道、森林、矿场等工作环境下,均能够精准完成三维场景地图构建,可广泛用于地理信息数据采集,林业资产管理、施工测量管理、古建筑数字化保护等作业领域,性能参数如表9所示。

开源模块介绍
ScanBot-X1开源模块介绍如下图所示,相关名词解释如下:
运行功能:通过桌面的相关图标启动程序以及功能,只能执行和运行。 提供二次开发接口:基于ROS1的话题和数据接口开放,不提供src源代码。 提供完整的源代码:提供的是真正的src源代码,可以查看和修改每一行具体代码。 开源项目:Fast-LIO2、Fast-LIVO、Fast-LIVO、Point-LIO可以设备直接运行实时采集,LOAM、A-LOAM、LEGO-LOAM、LIO-SAM、DLIO参考官方开源文档离线运行数据包。


注:本产品默认出的重建效果为自研代码运行效果!除了重定位部分的代码开放,其他代码不开放!本产品支持运行多种开源算法!
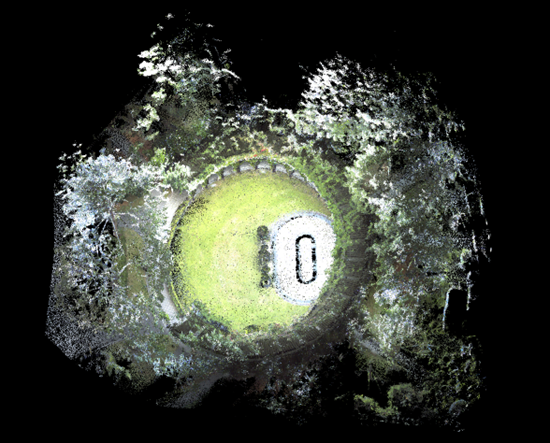
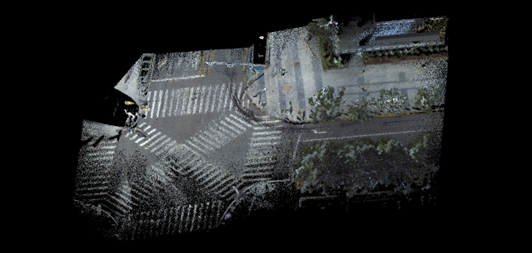
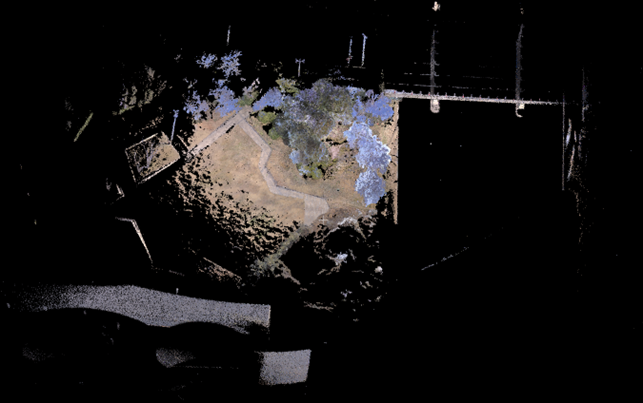
重建效果实例
ScanBot-X1集成多种传感器,胜任各类复杂室内外场景,在写字楼、停车场、工业园区,各类隧道、森林、矿场等工作环境下,均能够精准完成三维场景地图构建。可应用于地理信息数据采集、施工测量管理、林业资产管理、古建筑数字化保护。重建效果如图5~16所示。









产品内容
ScanBot-X1三维空间扫描仪套件产品内容如下:
硬件一套 用户使用教程 二次开发教程
本套手持扫描仪提供详细的使用教程和二次开发教程,便于用户使用和进行二次开发。
答疑服务
一年答疑服务。每个购买本产品的客户,我们将会拉一个微信答疑群,有问题可以随时群里交流。问题可以涵盖本套硬件和代码方方面面的问题。
产品采购



 扫码添加微信
扫码添加微信
- 点赞 0
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊







