PLC气动机械手设计(附论文和图纸)
- 2025-07-30 08:00:00

前言:关于论文和图纸的说明
笔者主要是对标题内容一系列的论文图纸收集整理和总结,便于大家在设计过程中集中参考!其中大部分论文都是包含图纸的,少部分只有论文或者只有图纸(注:参考资料见文末,若商用请取得原作者的授权!)

一、气动机械手的设计及其控制设计内容总结
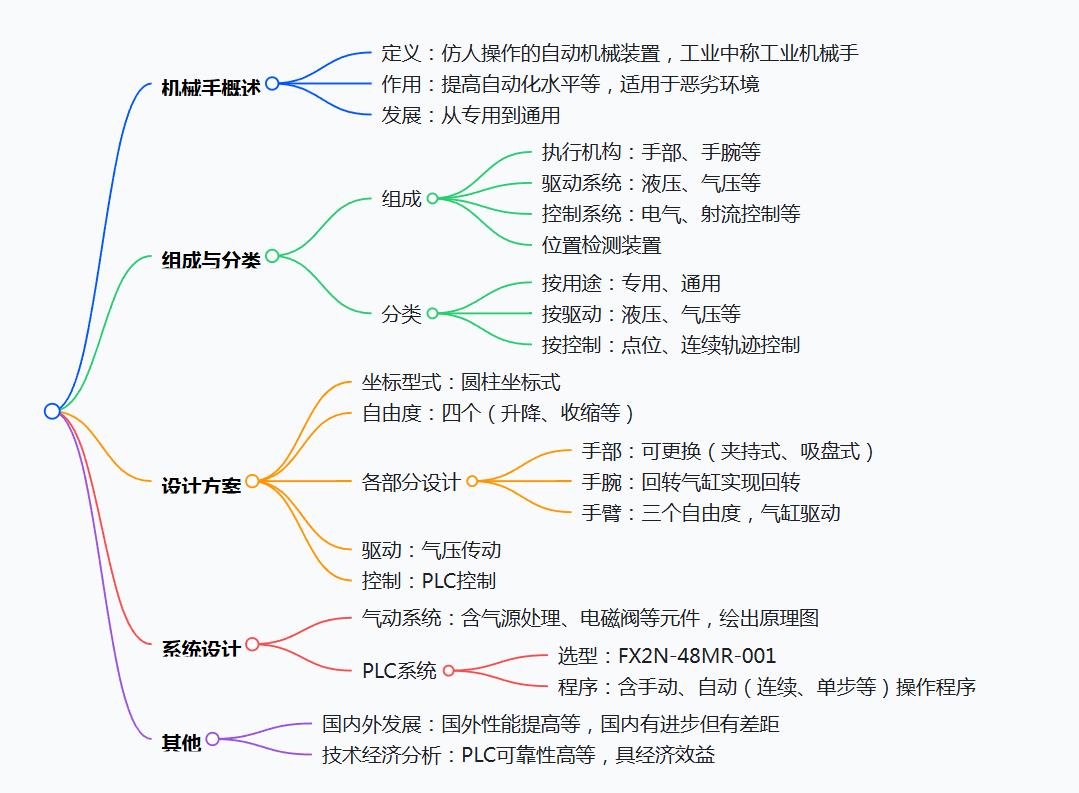
本文围绕气动机械手的设计与控制展开,介绍了机械手的概述、组成(执行机构、驱动系统等)和分类(按用途、驱动方式等),分析了国内外发展状况,提出采用气压传动(相比液压有介质处理方便等优势)和 PLC 控制的方案,详细阐述了机械手各部分(手部、手腕、手臂等)的设计、气动系统与 PLC 控制系统的选型及程序设计等内容,并进行了技术经济分析,强调该设计能提高生产自动化水平和效率。


二、气动机械手的设计及其PLC控制系统(含CAD图纸)
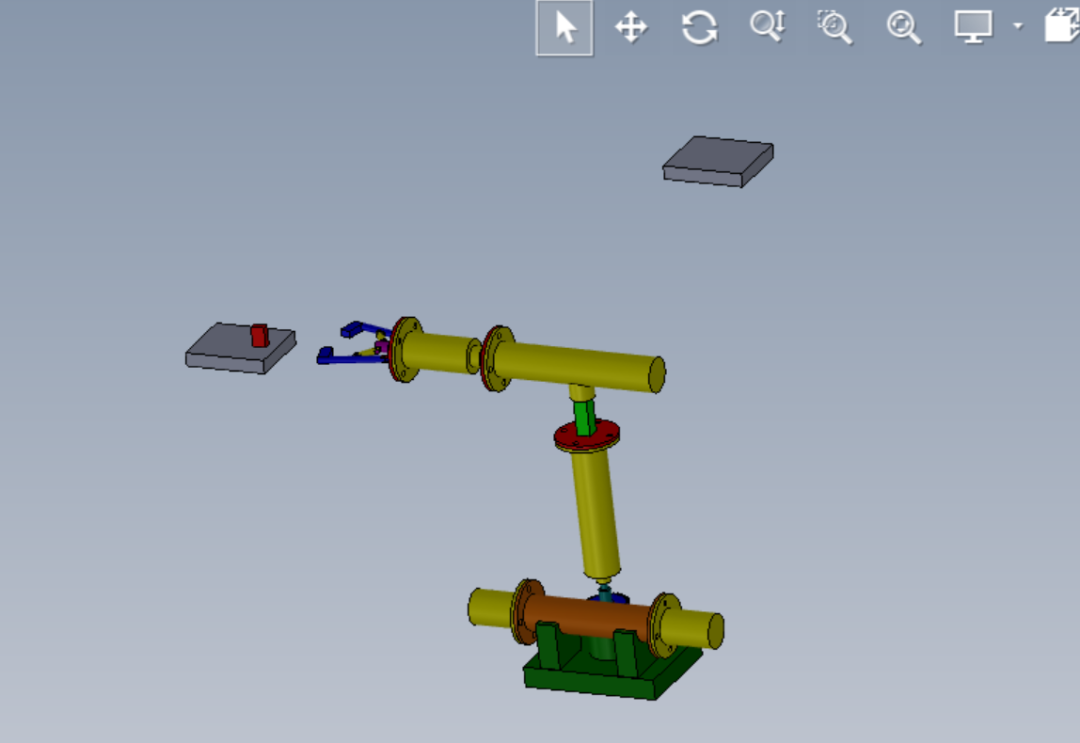
本文围绕气动机械手的设计及其 PLC 控制系统展开,详细阐述了机械手的功能分析、执行机构(气爪、伸缩缸等)及运动分析、驱动系统和检测系统,依据技术参数完成了各部件选型(如气爪选 MHC2-25D),进行了三维建模与仿真,介绍了 PLC 的相关知识并选型为松下 FP0 系列 C32 型主机加 E8 扩展单元,设计了系统的梯形图程序和硬件接线图,实现了机械手的自动和手动工作方式。


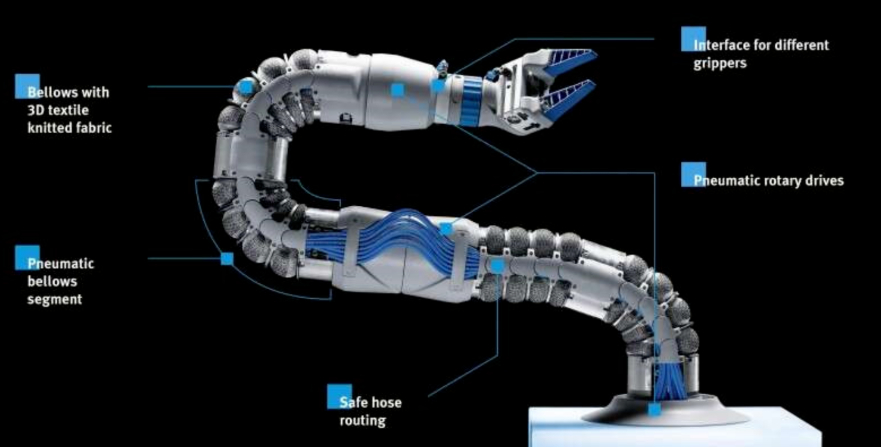
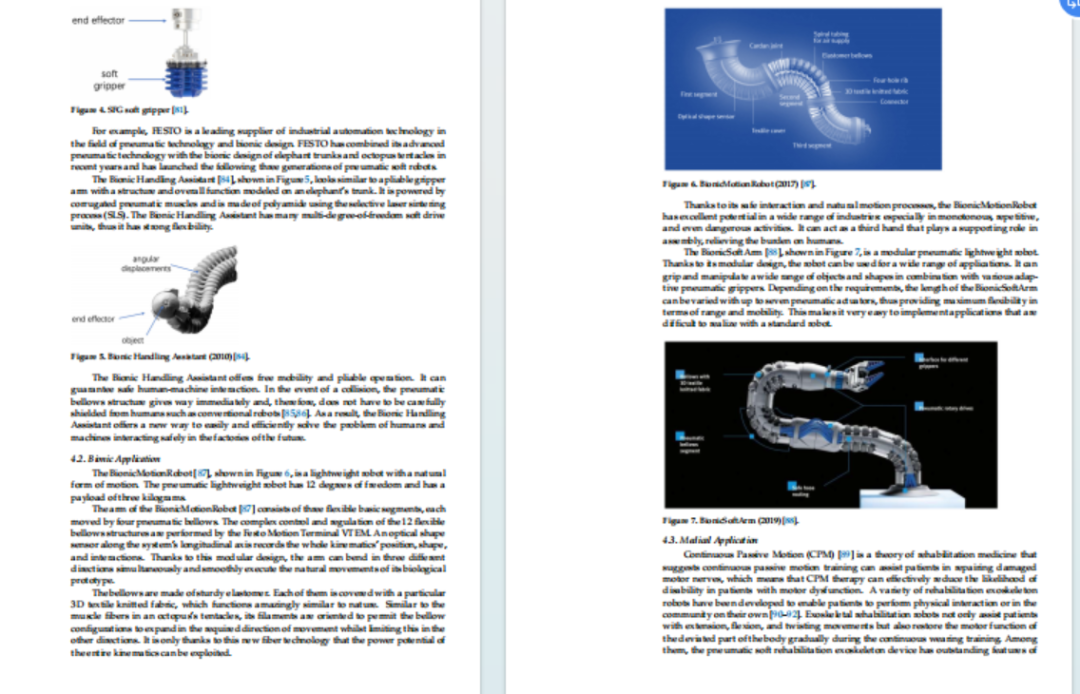
三、气动软体机器人
尽管传统的刚性机器人能够实现复杂且精确的运动,但它们通常需要依赖大量的刚性连杆和关节来实现多冗余运动控制。这类刚性连接的机器人通常被称为冗余或超冗余机器人[1,2]。机器人必须具备一定的灵活性,以避免在执行任务时对脆弱物体和人体造成损害。由于传统机器人普遍采用刚性驱动和刚性关节,工业界往往需要借助多种传感器或技术,如姿态监测、力反馈和机器视觉,来对输出功率进行精准控制,从而提升刚性机器人的安全性。
在提及上述挑战时,这类机器人最初被称作软机器人[2]。然而,随着软材料、仿生学和制造技术的不断进步,软体机器人的概念逐渐受到重视。软体机器人主要指那些主体由软材料构成,其运动主要通过自身结构的弹性变形来实现的机器人。相较于传统的刚性机器人,软体机器人在理论上拥有无限的自由度。其出色的安全性和灵活性有效弥补了刚性机器人的不足,展现了前所未有的适应性、安全性和敏感性,并持续拓展机器人的应用领域。因此,软体机器人一直是机器人技术发展的主要趋势之一。
参考资料(已汇总在Excel里,按文章标题关键字查找自取!)

Tips2:评论区留言所需资料,找到就发出来!

 扫码添加微信
扫码添加微信
- 点赞 (0)
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊