大连理工大学张雪涛教授团队利用子母式多无人机协同有效提升了复杂未知环境中系统多目标追踪能力
- 2025-07-18 11:53:10
本文由“机器人ROBOT”公众号原创,欢迎转载,请务必完整转载全文并在文章初始位置插入本公众号名片和链接。
欢迎引用:
王翰章, 张雪涛, 刘一莎, 张雪波, 庄严. 基于子母式多无人机协同的多目标追踪[J]. 机器人, 2025, 47(3): 348-360.
在包含未知障碍物的复杂环境中存在多个分布未知且运动随机的目标,如何通过在线规划调度来提升多无人机对多目标的追踪能力是实现多无人机多目标追踪的关键问题之一。为此,本文提出了一种基于子母式多无人机联合多目标覆盖和追踪方法。该方法首先利用 Welzl 算法生成的最小包围圆引导母机规划追踪轨迹以覆盖更多的目标;然后根据母机对多目标位置的预测结果调度子机抵近目标进行一对一追踪;最后子母机通过在线协同追踪以实现对区域内多目标的持续稳定观测。仿真实验结果表明本文提出的方法能够有效提升多无人机对多目标的观测能力,室外场景中的子母机多目标追踪实验验证了本文方法部署在实际多无人机平台上的有效性。
如图1(a)中母机高空扫描树林场景多目标时,树木阻挡致其无法持续稳定观测地面目标;图1(b)多台子机近距离一对一追踪多目标,该方案需子机提前完成区域目标搜索,对无人机续航能力要求高,且目标追踪时,树木覆盖或目标运动突变易致目标丢失,无人机需重新搜索,无法持续稳定追踪。针对这两种方案的问题,本文提出子母式多无人机协同多目标追踪方法:母机高空基于多目标轨迹预测生成最小包围圆,以圆心为终点规划追踪轨迹覆盖多目标,三台子机在其引导下近距离一对一跟踪目标,当子机因树木遮挡或目标运动突变丢失目标时,母机可为子机提供目标全局观测信息,引导子机继续追踪。
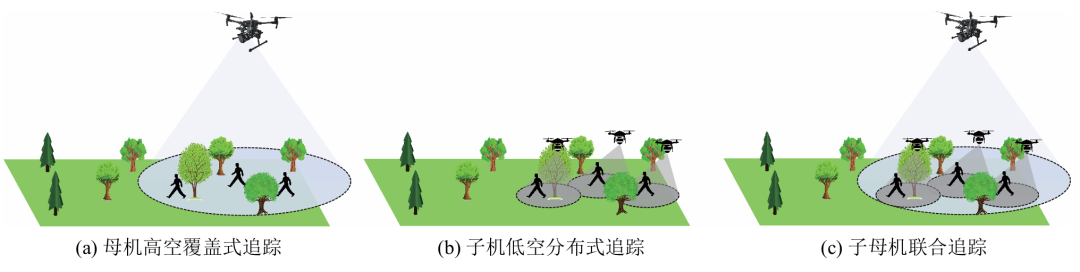
图1 3 种多无人机多目标追踪方案
为了提高该系统在包含未知障碍物的环境中对多目标的可持续观测能力,提出了一种可见性引导的子母式无人机系统,用于在未知环境中协同覆盖和跟踪多个目标。如图 2 所示,该系统由母机和子机这两种类型无人机平台组成。首先子母机通过各自携带的激光传感器进行相互观测实现协同定位;然后母机在高空携带远距离激光雷达对作业区域内的多个目标进行检测与关联;再根据多目标预测位置生成的最小包围圆规划追踪轨迹以扫描覆盖作业区域内的大部分目标;同时,母机调度与目标最近的子机携带近距离固态激光雷达对目标进行一对一追踪。母机在高空为子机提供对大部分目标的全局观测信息,以确保当子机由于障碍物遮挡或目标运动突变而丢失目标时仍能依据母机的指导重新追踪到目标。
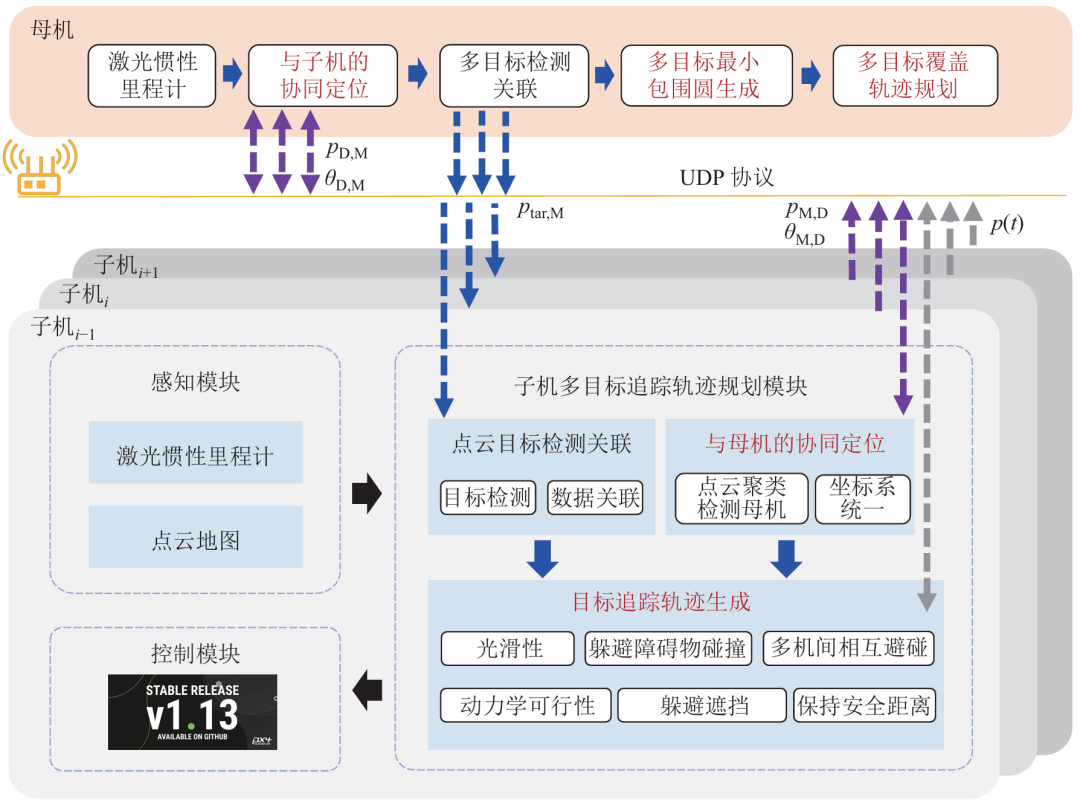
图2 系统框架
为了验证所提基于预测的最小包围圆引导方法在保持对多目标有效观测时间方面的能力,与固定路线巡逻方法和基于当前观测的最小包围圆方法进行了比较。
图 3 为 3 种追踪方法的定性比较结果,一架搭载远距离激光雷达的母机在一个大小为 50 m×50 m×10 m 且包含 100 个柱形障碍物的仿真环境中对 5 个随机移动的人体目标进行覆盖跟踪,母机的速度上限为 4.0 m/s,加速度上限为 4 m/s2。灰色圆形区域代表母机激光的扫描范围,红色圆圈是在母机感知范围内由Welzl算法生成的对多目标预测位置的最小包围圆。紫色虚线表示目标在母机的观测范围内,粉色曲线表示母机预测目标的未来轨迹,灰色曲线表示母机的历史轨迹。由图3(a)可以看出,母机的运动不是以目标为导向的而是被动的,此刻母机只能观测到目标3。由图3(b)可以看出,母机的运动是以目标为导向的,但是由于缺乏对目标运动的预测,导致母机易受离群点的干扰而无法有效追踪区域内的大部分目标,此刻母机只能追踪到目标 0。由图3(c)可以看出,母机依据对多目标运动的预测结果提前将离群点剔除,能够有效覆盖区域内的大部分目标,此刻母机能够追踪到目标 1、3 与 4 这 3 个目标。

图3 子母无人机在包含100个障碍物的场景中对5个目标的联合追踪
为了进一步验证所提方法在实机平台上对真实目标追踪能力,我们搭建了由 4 架无人机组成的子母式多无人机追踪平台。如图 4 所示,一架轴距为700mm、配备有远距离激光雷达Ouster OS1-32的无人机被作为母机,而其他三架轴距为 450mm 的无人机被用作子机,每架子机都配备了一台近距离固态激光雷达 Mid360。
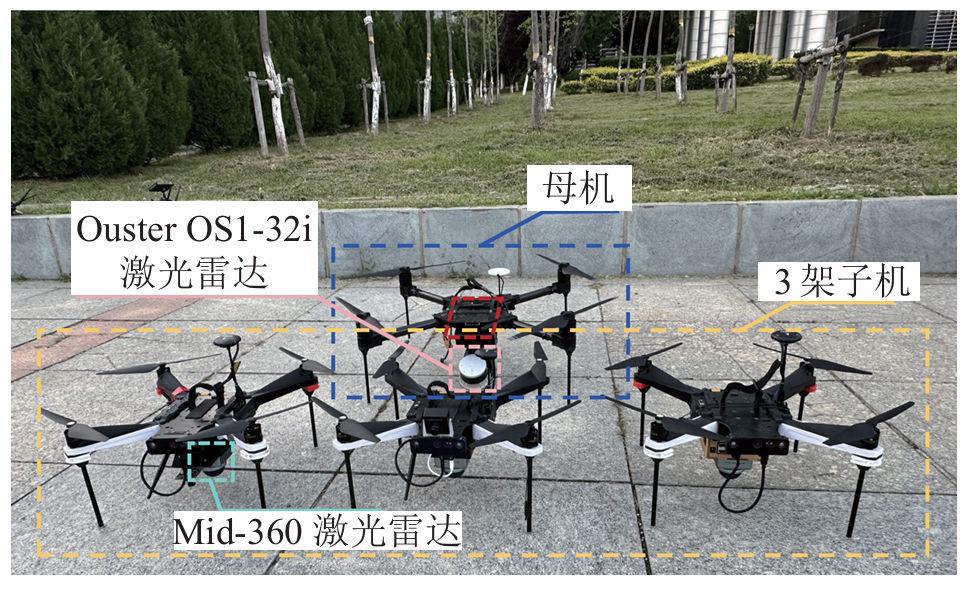
图4 子母无人机硬件平台
多无人机系统对两个目标追踪过程的历史轨迹如图 5 所示,母机在 6m 高度执行对多目标的覆盖追踪任务,子机在 2.0m 高度执行对单目标的近距离追踪任务,目标中心高度约为 1m。

图5 室外实测实验中无人机与目标的历史轨迹
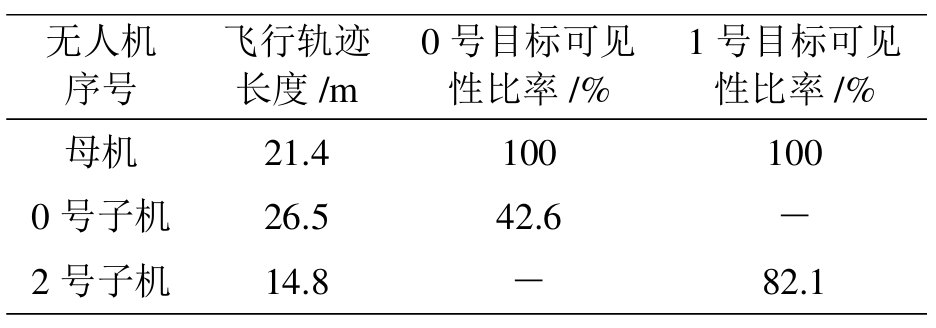
实验过程中无人机的飞行轨迹长度与目标有效观测比率的比较结果如表 1 所示。可以看出母机对两个目标保持了全程观测,有效观测比率达到 100%,而 0 号目标的初始位置距离子机较远,与其相对较近的 0 号子机在母机的引导下飞行一段距离之后自身携带的传感器才检测到 0 号目标,因此 0 号子机对 0 号目标的有效观测比率较低,仅为 42.6%。
虽然 1 号目标初始位置距离 2 号子机较近,但是由于 2 号子机的初始状态为在地面待机,其激光传感器方向朝下,因此 2 号子机只有在接收到母机分配的追踪指令并起飞悬停到一定高度以后才检测到1号目标,因此 2 号子机对 1 号目标的有效观测比率无法达到 100%,仅为 82.1%。
表1 飞行轨迹长度与目标有效观测比率比较结果
为提升多无人机在复杂未知环境中对多目标的持续观测能力,本文提出子母式协同追踪方法,通过子母机相互观测统一坐标系统,构建多目标预测位置最小包围圆引导母机规划轨迹以覆盖更多目标,子机在母机全局引导下追踪目标,即使因障碍物遮挡或目标运动突变丢失目标,也能借助母机观测信息继续追踪。实验对比验证了该方法在维持多目标可见性方面的优势,室外实测进一步证实其在实际飞行平台中的有效性与实用性,未来拟研究多母机系统对分散目标的分布式覆盖追踪。


识别二维码,访问全文PDF
联系我们 :

电话:024-23970050

E-mail:jqr@sia.cn

网址:https://robot.sia.cn

 扫码添加微信
扫码添加微信
- 点赞 0
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊