3天搞定人形机器人VLN实战(含强化学习、自主避障等9个项目实战)
- 2025-07-17 10:56:00
随着特斯拉Optimus、Figure等巨头加速商业化,人形机器人已成为科技竞争新赛道。但是人形机器人企业处于探索初期,各家公司都在竞相笼络研发人才,力争在这波风口上存活下来。很多人形机器人企业都在广泛招聘运动控制、强化学习、SLAM、视觉/雷达感知、VLA、C++等岗位的工程师。

目前大部分伙伴只对人形机器人的理论和算法有一些了解,但是学得不精(缺少真机数据、demo会跑但不会解决故障等),更没有实战部署经验(部署鸿沟大,更别提落地)。几乎所有的学习者面临着“缺设备、少机会、难落地”的困境,难以将所学算法理论部署到实机硬件上转化为工程能力。
因此,深蓝学院联合宇树科技共同打磨推出了《人形机器人线下实训营:技术与实机实战》课程。
实训营采用线下小班制教学模式,5-6人一组,每组全程配备1台宇树G1人形机器人及一名专属助教,同时配备Livox Mid-360激光雷达、RealSense D435i深度相机等设备及1000平米实训场地,确保每位学员都有充分实操机会,真正把技能“练到手、用得上”。
以下是部分项目实践:



名额有限,扫码咨询
仅剩【10个】名额



3天阶梯式突破
1. 零基础掌握G1人形机器人双语言SDK开发(C++/Python)
2. PPO强化学习运动控制→仿真验证→真机部署全流程闭环
3. FAST-LIO2建图+NDT/GICP定位+A*规划+DWA避障组合拳
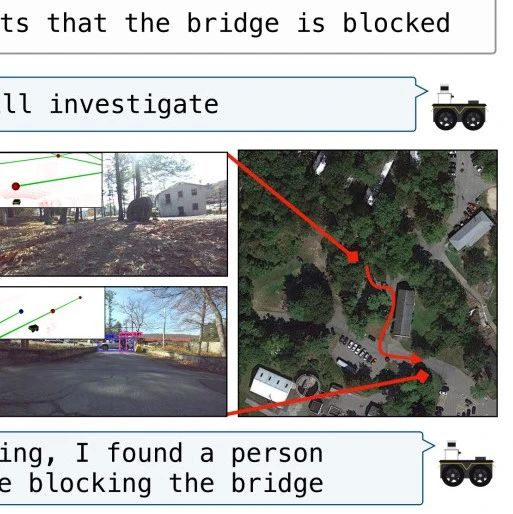
4. TarePlanner/FarPlanner 未知环境自主探索建图与导航
5. VLN端到端导航:语音指令→视觉感知→路径决策
技术全景贯通
硬件层:关节电机控制→传感器组合(激光雷达+深度相机)
软件层:ROS2通信→SDK接口开发→算法部署
算法层:PPO强化学习→A*/DWA规划→TarePlanner/FarPlanner→VLN
真机实战保障
硬件配置:5-6人一组,专属宇树人形机器人+Mid 360+RealSense相机
场景真实:1000㎡动态测试场,含玻璃墙/移动障碍等复杂工况
双师护航:主讲资深工程师+助教团指导,每天2小时自由debug

我们精心设计了为期3天的高强度实战课程:
第一天,掌握宇树G1人形机器人的SDK二次开发与强化学习行走控制,亲手让人形机器人动起来;
第二天,深入自主建图与定位、路径规划与避障,实战复杂环境下的智能导航;
第三天,挑战自主探索与视觉语言导航(VLN)等前沿任务,迈向具身智能时代人机协同新范式。

名额有限,扫码咨询
仅剩【10个】名额

 【深蓝具身智能读者群】-参观机器人:
【深蓝具身智能读者群】-参观机器人:
我们开设此账号,想要向各位对【具身智能】感兴趣的人传递最前沿最权威的知识讯息外,也想和大家一起见证它到底是泡沫还是又一场热浪?
欢迎关注【深蓝具身智能】👇



点击❤收藏并推荐本文

 扫码添加微信
扫码添加微信
- 点赞 0
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊