


为削减成本,日产汽车将关闭日本追滨工厂;消息称比亚迪将进行天神之眼史上最大规模的智驾OTA;全球首款文商旅体专用双足机器人发布
- 2025-07-18 09:55:59


牛喀快讯
7月18日


为削减成本,日产汽车将关闭日本追滨工厂
牛喀网综合报道,外媒消息,日产汽车(Nissan)宣布关闭其位于日本追滨的旗舰工厂以削减成本,并将该厂所有生产业务转移至日本西南部的另一家工厂。消息详情为,日产汽车在近日的一份声明中表示,位于东京南部神奈川县的追滨工厂的汽车生产将于2027财年年底(即2028年3月)结束。此后,所有曾在追滨工厂生产或计划在该厂生产的车型都将转至位于福冈县的日产汽车九州工厂生产。另有媒体分析,此次关闭追滨工厂在意料之中,因为此前日产汽车已多次表示,正在对业务进行重组以提高盈利能力,包括整合生产基地。此外,今年早些时候,日产已宣布全球裁员约15%(约2万人)。


牛喀网综合报道,有媒体消息称,比亚迪将进行天神之眼史上最大规模的智驾OTA。全面覆盖泊车、行车、安全三大板块十余项功能,涉及天神之眼A/B/C三大平台多款车型。泊车方面,天神之眼新增三速泊车、车头泊入、偏置泊车、窄车位泊车自动收后视镜等功能,并优化了悬空障碍物识别功能;行车方面,天神之眼可覆盖更多场景,如环岛通行、复杂场景连续绕行、高速施工路段借应急车道绕行、窄路多把掉头等,还新增前车加塞场景下的闪灯鸣笛提醒功能;安全方面,天神之眼AEB功能可更轻松识别低矮障碍物,在夜间80km/h情况下可实现对两轮车侵入车道紧急刹停,120km/h触发AEB也能做到两段式舒适刹停。


据IT之家报道,宇树科技团队实现四足机器人规模化量产,销量占全球出货量的60%-70%,大尺寸通用人形机器人业务范围覆盖全球50%以上的国家和地区,推动“中国智造”出海。宇树科技所有关键技术均为自研,在机器人核心零部件、运动控制、机器人感知等综合领域居领先地位;关注社会发展需求,为农业、工业等基础领域和电力巡检、勘测探索、公共救援等高危领域研发特种机器狗,提高传统行业智能发展。王兴兴介绍,宇树科技主要做高性能四足机器人和人形机器人,在过去也取得一些成绩,很多技术指标处于目前全球领先水平。


据红星新闻报道,成都兴锦人形机器人科技有限公司发布全球首款文商旅体专用双足机器人“镋钯”。该机器人拥有全球首创仿生步态运控系统,不仅有丰富的肢体动作,还构建独特的视觉语言动作矩阵;通过全球最高6自由度机器人头部,配合全球双足机器人最大尺寸屏幕显示,结合情绪感知与微表情识别技术,可以实现生动表情交互与融媒体内容展示。机器人预留了丰富文创元素模块化接口,可实现快速“变装”,通过前后多点位接插接口,可快速更换三星堆面具、川剧脸谱、大熊猫元素等文化组件,后背还可安插各类特色旗幡等装饰件。未来还将推出三星堆机器人、仿生恐龙机器人、熊猫机器人等系列产品。


据科技行者报道,KAUST研究团队开发了UnMix-NeRF框架,它就像是给传统的3D重建技术注入了"材料识别"的超能力。这个系统能够同时完成两个看似不相关的任务:从不同角度重建物体的高质量3D图像,以及自动识别和分离场景中的不同材料。研究团队巧妙地将这种光谱信息与神经辐射场(NeRF)技术结合起来。与传统方法相比,UnMix-NeRF的创新之处在于它同时考虑了材料的漫反射和镜面反射特性。漫反射就像是粗糙表面的光线散射,而镜面反射则像是光滑表面的光线反射。通过分别建模这两种反射类型,系统能够更准确地重现各种材料的视觉特性。UnMix-NeRF在光谱重建质量和材料分割精度方面都明显优于现有方法。
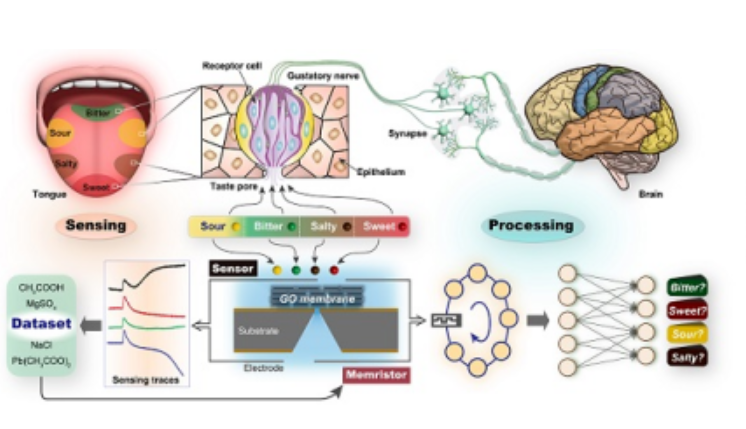

我国研究团队在基于离子型神经形态器件构筑智能味觉系统方面取得进展
据爱集微报道,近日,中国科学院国家纳米科学中心鄢勇团队在基于离子型神经形态器件构筑智能味觉系统方面取得进展。该研究基于层叠的氧化石墨烯薄膜,开发出集传感与计算功能于一体、可在水相中工作的新型纳米离子器件。离子动力学表征与有限元理论模拟研究显示,氧化石墨烯片层中界面吸附-解吸附过程可显著迟滞离子的迁移速度,从而赋予该器件离子传感和忆阻特性。研究利用这一器件的传感功能构建了多种味型的化学样本库,并基于其神经形态计算功能构建了储备池计算网络以模拟人工味觉系统。该系统可实现酸、苦、咸、甜四种基本味型以及咖啡、可乐等复杂风味的准确识别。


据金融界报道,智己汽车科技有限公司取得一项名为“一种数据采集系统及车辆”的专利。专利摘要显示,本实用新型涉及一种数据采集系统及车辆,涉及智驾数据采集技术领域,所述系统包括采集触发按键,用于基于用户操作,生成触发信号;数据采集主机,电连接于所述采集触发按键,响应于所述触发信号,生成数据采集信号;数据采集终端,数据连接于所述数据采集主机,响应于所述数据采集信号,进行数据采集;其中,所述数据采集终端包括外接摄像头,所述外接摄像头响应于所述数据采集信号,进行车端显示屏幕录制。本实用新型用于实现车端数据的自动化采集。


据十轮网报道,百度近日宣布,旗下自动驾驶服务萝卜快跑,与叫车平台Uber创建战略合作伙伴关系,萝卜快跑计划将数千辆无人驾驶汽车,接入Uber全球出行网络。2025年底前,双方将在亚洲和中东市场部署萝卜快跑第六代无人驾驶汽车,未来逐步扩展至全球更多市场。该集团指出,萝卜快跑目前已于全球部署超过1000辆无人驾驶汽车,遍及香港、迪拜、阿布达比等15个城市,在全球提供超过1100万次出行服务。另外,Uber于5月上旬与中国自动驾驶技术公司小马智行完成战略合作,小马智行的Robotaxi服务及车队将于今年下半年接入Uber平台,并于中东市场率先启动。








 扫码添加微信
扫码添加微信
- 点赞 0
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊







