Nature Communications:人工有机传入神经为智能机器人提供闭环触觉反馈
- 2025-07-15 18:56:09

在具有人工智能的机器人中,模拟触觉神经以实现高级感觉功能是人们非常感兴趣的。然而,此类设备仍然体积庞大,缺乏可靠的能力来利用本体感觉反馈进一步功能化突触设备。在这里,我们报告了一种通过整合压力激活的有机电化学突触晶体管和人工机械感受器实现的低操作偏压(-0.6 V)的人工有机传入神经。神经机器人的树突集成功能可以感知物体的方向运动,通过利用分布式和并行网络进一步降低控制复杂性。一种由人工传入神经组装而成的智能机器人,结合闭环反馈程序,被证明可以在物体发生滑动时快速实现滑动识别和预防动作。用深度学习模型处理尖峰编码信号后,触觉模式的时空特征得到了很好的区分,具有很高的识别精度。这项工作代表了模仿突触行为的突破,这对下一代智能神经机器人和低功耗仿生电子学至关重要。

相关研究成果以“Artificial organic afferent nerves enable closed-loop tactile feedback for intelligent robot”为题发表在国际顶级期刊Nature Communications上,新加坡南洋理工大学Nripan Mathews教授和Wei Lin Leong教授为论文共同通讯作者。

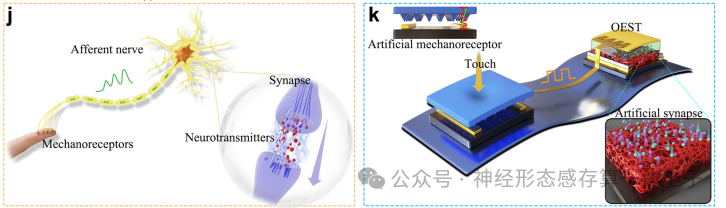
假肢、仿生电子和智能机器人系统的未来发展将从人类触觉系统中获得灵感。人类触觉系统通过皮肤中的时空机械变形产生压力和振动感。外周神经系统通过协调传入和传出神经来控制对刺激的感知及其反应。人类的触觉感知是通过皮肤上的专门机械感受器发生的,这些感受器产生动作电位,沿着神经纤维传播到脊髓和大脑。触觉是在人脑的初级体感皮层中处理的,它产生压力的感知,并提取其位置和强度等特征。这些信息用于确定如何应对压力,包括保护措施。运动神经元携带对相应肌肉的反应信号,使肌肉收缩,产生运动。

为了实现触觉感知、信息处理和运动反应,传入神经在将触觉信息从皮肤机械感受器传递到中枢神经系统(CNS)方面发挥着关键作用,而传出神经将运动信息从CNS传递到身体肌肉以启动动作。皮肤机械感受器决定从机械刺激到电信号的转换,然后通过神经元传递到中枢神经系统。在各种类型的慢适应性(SA)机械感受器中,Merkel细胞能够对静压刺激产生持续反应,对轻触具有高度敏感性,而与快适应性(FA)机械感受机相关的Ruffini小体能够感知定向触觉刺激,并监测物体沿皮肤表面的滑动,从而实现抓握的重新调整。神经元在称为突触的连接处相互通信,化学通量调节两个神经元之间突触连接的强度,以实现信号处理。机械刺激产生的动作电位触发神经递质从突触前小泡释放到突触间隙,然后与突触后神经元的受体结合,这将导致渗透离子(Na+和K+)的离子通道打开,并产生兴奋性突触后电位。需要机械感受器、神经元和突触的分布式并行网络来有效地感知、传输和处理复杂的触觉刺激,促进运动和操纵。
模仿人类触觉系统的努力包括开发简单的两端电容式和压阻式触摸传感器,以模拟SA机械感受器的信号传导机制。然而,这种人工机械感受器对输入刺激表现出不稳定的行为,产生时间状态增强,迅速衰减到其初始状态,这阻碍了后续的信号传输和神经形态模式下触觉信息的处理。受生物神经系统的启发,近年来,提供与生物突触类似功能的人工突触装置引起了广泛关注。例如,经典的软件级神经形态计算系统已被用于模拟基于冯·诺伊曼模型的生物触觉神经系统,从而能够区分盲文字符并控制智能神经机器人系统和仿生假肢腿式机器人中的执行器。然而,由于与人脑中发生的大规模并行信号处理的根本区别,传统的冯·诺伊曼架构在模拟类脑计算过程方面表现出不可避免的局限性,并且由于物理上离散的核心计算处理器和存储单元,实现了节能的认知计算系统。为了克服这些瓶颈,使用微电子设备的大脑启发的神经形态芯片已经成为模拟生物神经系统的人工智能的硬件实现。
然而,大多数先前的报告都显示了模拟动作电位刺激的突触激活,并且没有将突触激活整合到并行和事件驱动的人工感觉系统中。为了构建一个生物启发的人工触觉系统,将人工机械感受器与人工突触和神经元集成在一起,为模拟人类的触觉感知和信息处理提供了一个战略机会。尽管以这种方式构建的人工传入神经已被证明能够在连接到昆虫的运动神经时通过刺激来驱动肌肉,但该系统会无意识地对触觉刺激做出反应。用于感测、处理和致动的闭环操作对于创建具有意识响应的人工触觉系统是必不可少的。这种闭环触觉反馈将使复杂任务中的智能决策成为可能,例如允许夹具重新调整力以防止滑动,或者在压力阈值以上采取规避动作。此外,大多数突触整合的特征只是对触觉刺激的短暂或短期反应。响应必须足够长,以防止信号丢失并提高传输过程中的信号转换效率。除了集成之外,还存在高写入电压、非线性和缺乏生物相容性等挑战,因此需要开发用于人工机械反射弧的新材料和架构。

有机半导体因其生物相容性、机械灵活性、低温加工性、出色的可调性和低电压操作性,是构建传感和神经形态器件的有前景的候选者。与神经突触中突触前动作电位产生和调节兴奋性突触后电流(EPSC)类似,三端有机晶体管以类似的方式工作,通道中的电荷载流子由输入门电位控制,这已被广泛探索用于模拟突触行为和构建人工神经。最近,由于电势和半导体输运特性之间的耦合效应,基于有机场效应晶体管(OFET)的人工视觉和触觉传感系统已被利用,将外部刺激的信息编码为输出电信号。尽管OFET在模拟神经形态功能方面取得了成功,但操作通常需要大的写偏压(~10V),再加上有限的长状态保持,这对基于硬件的人工神经网络来说是必不可少的。鉴于这些缺点,具有低工作偏压和长期状态保持的有机突触晶体管是非常理想的。

有机电化学晶体管是具有大跨导(gm)和低工作偏压(<1 V)的混合离子/电子器件,利用离子在整个体积半导体中的电化学掺杂,促进离子通量有效地转化为电流。有趣的是,动作电位触发的神经递质的释放和摄取以及EPSC的产生与有机电化学晶体管的操作非常相似,其中半导体中的电导率调制是通过电压控制的可移动离子的注入和提取来实现。耦合的离子/电子效应赋予有机电化学突触晶体管(OEST)低功耗、短期或长期状态保持和用于神经形态计算的多级不同电导状态,从而为在人工触觉神经系统中实现仿生机电传导和信号处理提供了一条潜在途径。然而,最近报道的OEST在耗尽模式下运行,即使在没有驱动偏压的情况下也会消耗功率。此外,关于使用OEST构建人工传入神经来处理触觉信息的工作仍然缺乏。尽管用于机器人感觉运动集成和学习的OEST已经得到证实,但具有智能传感、高效信息处理和神经机器人自适应控制的智能人工触觉系统仍处于早期阶段。

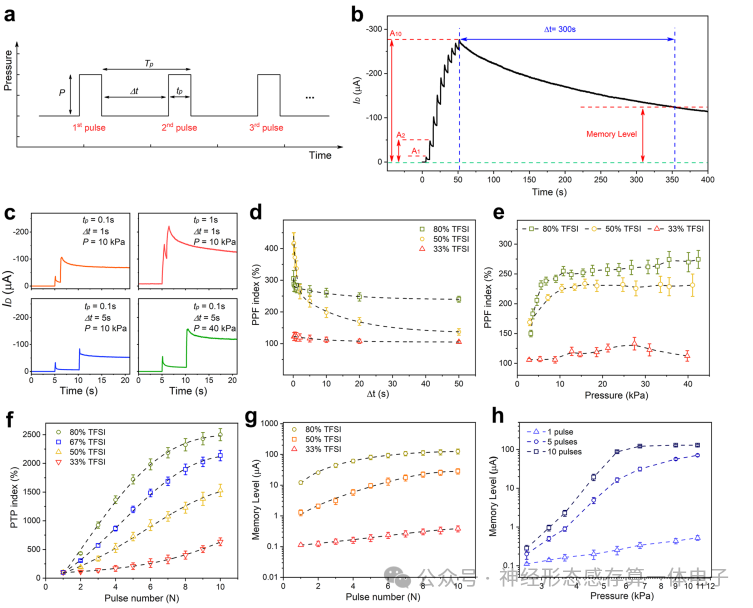
在这项工作中,我们提出了一种通过触摸触发OEST实现的柔性人工有机传入神经(AOAN),展示了智能机器人基于硬件的认知识别能力。AOAN不仅可以感知外部触觉信息,还可以调节其对静态和动态触摸刺激的反应,从而能够在记忆中计算感官信息,类似于生物触觉系统。AOAN显示出压力强度依赖的瞬态响应,并在-0.6的低操作偏差下通过训练过程增强了对轻触的触觉敏感性 V.此外,为了说明在神经机器人技术中的潜在应用,实现了AOAN中的树突整合功能,以感知定向触觉模拟并识别物体的滑动。可检测的运动频率为40 达到Hz,完全覆盖了默克尔盘机械感受器的敏感范围(5-15Hz)。最后,通过学习定向触摸的实时空间信息,演示了一种具有AOAN系统的智能神经机器人,该系统结合闭环反馈程序,在发生滑动事件时实现滑动识别和预防措施。AOAN为下一代节能、大规模、具有交互式感觉/记忆/计算能力的硬连线神经形态系统开辟了有前景的途径。

如需咨询商务合作、宣传推广、转载开白等事宜,请联系:18355423366 (微信同号)对接。
END


 扫码添加微信
扫码添加微信
- 点赞 0
-
分享
微信扫一扫
-
加入群聊
扫码加入群聊